Pine Island Glacier
-
- AUVs Under Ice: Past Milestones, Promising Future Marine Technology, Oct 2016 #32
The marine environments beneath ice are arguably some of the least accessible on earth. Ice is a formidable physical barrier that can range in thickness from centimeters to hundreds of meters—an impediment that has not diminished our desire to uncover the secrets that lie beneath.In the heyday of manned submarines, under-ice was seen as an important operating theater, where the ability to listen and monitor one’s foes was crucial. As manned submarines have given way to unmanned vehicles, the duties of under-ice research have widened to include more fundamental motivations, as we discover more about how ice affects our climate and ocean levels—and seek to understand how these are changing.Reviewing the major milestones in the use of autonomous underwater vehicles (AUVs) under-ice brings to life how and why the vehicles have developed and helps us make predictions about the form and capabilities of the AUVs of the future.The PioneersIt all began in Spring 1972, when the University of Washington’s Applied Physics Laboratory (APL) deployed its Unmanned Arctic Submersible (UARS) beneath Fletcher’s Ice Island, an iceberg near the North Pole.This untethered robot, a direct descendant of the very first AUV, was deployed through a hole cut into the ice and conducted a series of out-and-back transects, collecting data related to the acoustic reflection coefficients from the underside of ice and the topography of the base surface.The UARS was equipped with an acoustic pinger, monitored by two ice mounted hydrophones. As the UARS performed its transects, the received signal – both direct and reflected – provided characterization of the acoustic environment and the reflectivity of the ice over a range of grazing angles. In addition, the signal was received by four tracking hydrophones that provided the position of the vehicle over an area of 0.8km squared. The UARS also carried a three-beam, upward-looking sonar that collected ice draft data.For AUV operators, a true mark of success is retrieval of the vehicle and data at the end of the mission. For UARS, this was an especially challenging task as the only route to the surface was through the small launch hole. To return a 10-ft. long vehicle with minimal onboard navigation and that has just conducted 17.5 miles of transect, a homing system was developed prior to deployment. This consisted of a single acoustic beacon suspended through the recovery hole.On board the UARS were two forward-facing directional hydrophones and an aft mounted, omni-directional hydrophone. The received signal from the beacon triggered the UARS to return home and steer on target. Using time-of-arrival differences, the UARS could distinguish the bearing to the beacon and understand whether it was facing towards or away from it. Upon arrival at the site, a barbed probe on the nose of UARS entangled with a suspended recovery net, allowing recovery by the gantry.And Then There Was TheseusAs new technologies emerge, there will inevitably be leaps taken to push the envelope of what is possible. For under-ice AUVs one such leap was Theseus. Developed by International Submarine Engineering (ISE), Theseus was a 10.8m, 8,600kg giant, designed to lay up to 220km of fiber optic cable in ice-covered waters.Theseus implemented a layered and modifiable software architecture for real-time control. This system relied on a fault detection and response system to handle error events though the various stages of a mission. To handle the navigational requirements of such long distance transects, a ring-laser-gyro system coupled to a doppler velocity log – measuring relative speed – was employed to deliver positional accuracies of better than 1% of distance travelled. An external acoustic system was used for cable delivery and vehicle recovery.In April 1996, following initial endurance testing and trial, Theseus completed a one-way transect of 175km in the ice-covered waters north of Canadian Forces Station Alert. Launching consisted of a gantry launch through a 2m x 13m ice hole. The mission had a series of six acoustic beacons along the path to aid in directional homing, with the first two monitored for telemetry contact. At the mission terminus, Theseus was required to fly through a 200m wide metal loop to capture the cable; as it approached, manual control was enacted to fly the vehicle through the goal.At this point, Theseus parked under the ice and awaited instruction. Following cable recovery, a position update was provided and the journey home began. Near the end of the return trip, a failure to home on one of the beacons enacted the fault control and Theseus again parked under the ice. Using telemetry, final instruction was given to return to the launch hole. Following this record-setting run of 350km, Theseus completed a follow up mission of 320km.The AUTOSUB StoryFollowing successful missions beneath sea-ice in the North Weddel sea in 2001 to survey Antarctic Krill, an ambitious five-year program was initiated to investigate the marine environment beneath floating ice shelves. The Autosub Under Ice (AUI) program of the U.K.’s Natural Environment Research Council (NERC) would investigate both the Arctic and Antarctic using the Austosub-2 AUV, designed and built at the U.K.’s National Oceanographic Center, Southampton. This 7m long, high-endurance AUV included an advanced positioning system which consisted of a fiber-optic gyro and both upward and downward Doppler velocity logs (DVLs) for bottom, under-ice, or water column speed tracking. The Autosub-2 had a obstacle avoidance scheme that could allow it to venture into unknown environments.From 2003 to 2005 the Austosub2 performed under-ice missions in both the Antarctic and Arctic, where a number of major feats were accomplished including the first multibeam image of the underside of sea-ice, taken off northeast Greenland. A major milestone was reached in 2005 when the Austosub2 ventured 25km beneath the Fimbul Ice Shelf; an amazing first for an AUV. This mission allowed retrieval of data in an environment virtually unreachable by previous means and yielded the first ever image of the shape of the underside of an ice shelf, showing a much richer topography that previously thought.The Austosub program showed what was capable with an AUV operating under ice, but also highlighted the real risks involved: on a follow up mission beneath the Fimbul Ice Shelf in Antarctica, the Autosub’s emergency beacon was heard, indicating an abort. At a location about 14kms from the edge, the Autosub-2 was lost.Following the loss, two outcomes emerged. The first was a realization that the risks of AUVs operating under ice need to be better understood. As a result, a body of work began to emerge from Southampton involving much of the wider AUV community to try and model the failures of AUVs. The objective was to help predict, or at least quantify, the potential risk of loss and has benefited today’s under-ice operations. The second outcome was the development of Autosub-3, a new vehicle that would go on to successfully survey beneath the Pine Island Glacier in Antarctica in 2009.A Record is BornIn 2010 International Submarine Engineering (ISE) once again raised the bar for distance and endurance in under-ice operations. This time, their Explorer AUV, a 7.4m long, 5,000m depth-rated vehicle, would be tasked with measuring the topography of Canada’s Northern continental shelf.Submerged for 12 days, the Explorer would conduct three missions: a 320km transect departing a near shore ice camp to a remote camp located on an ice floe; a 280km mission out from and back to the remote camp; and a 320km return trip. During these missions the AUV would not be recovered, but would instead dock at a through-ice capture system developed and tested the previous year by Memorial University of Newfoundland. This system would allow the AUV to be held fast, charged and provided with a wired connection for data exchange. It also supplied a means to realign the internal navigation system. To reach a remote point after such a long journey, a novel homing system was developed to allow the AUV to steer toward a single, low frequency sound source.What’s Next?For those of us who hope to stand on the shoulders of the aforementioned giants, what will the next generation of under-ice AUVs look like?No doubt they will be more efficient, with new power sources, enabling endurances beyond the hundreds of kilometers into the thousands of kilometers. They will be more aware of their surroundings, relying less on pre-scribed mission scripts and more on general guidelines where the missions can adapt to what is sensed.Improvements will be seen in how they navigate and position themselves, relying more on perspective observations of the environment and self-generated maps.We will see developments into physical interaction, adding to the existing remote sensing capabilities, where physical samples may be taken from these remote areas.Under-ice AUVs will become more common, and with that, more reliable to the point where their use will be ubiquitous in the collection of critical data locked away below the ice.We will even see them used in the ice-covered oceans of other worlds, such as Jupiter’s moon Europa. (see related story on page 22, this edition).AMC is establishing an AUV research facility to house a fleet of AUVs, include a new Explorer class AUV from International Submarine Engineering (ISE) for under-ice exploration in Polar Regions.(As published in the October 2016 edition of Marine Technology Reporter)
-
 )
March 2024 - Marine Technology Reporter page: 26
)
March 2024 - Marine Technology Reporter page: 26FEATURE OCEANOGRAPHIC INSTRUMENTATION & SENSORS Kevin Mackay, TESMaP voyage leader and Center head of the South and West Paci? c Regional Centre of Seabed 2030. Kevin in the seismic lab at Greta Point looking at the Hunga Tonga-Hunga Ha’apai volcano 3D map completed with data from the TESMaP voyage
-
 )
March 2024 - Marine Technology Reporter page: 22
)
March 2024 - Marine Technology Reporter page: 22FEATURE OCEANOGRAPHIC INSTRUMENTATION & SENSORS Aerial view of HT-HH volcano, showing new multibeam depth data overlaid on islands satellite image. © SEA-KIT, NIWA-Nippon Foundation TESMaP 22 March/April 2024 MTR #3 (18-33).indd 22 4/4/2024 9:08:10 AM
-
 )
April 2024 - Marine News page: 41
)
April 2024 - Marine News page: 41Vessels Gripper ing European CTV operator Northern Offshore Services (N-O-S) and U.S.-based investment ? rm OIC. The vessel, based on N-O-S’ 30-meter G-class design, fea- tures Volvo Penta’s IPS propulsion system and is said to be “hybrid-ready”, meaning it was built with space reserved for all the
-
 )
April 2024 - Marine News page: 40
)
April 2024 - Marine News page: 40Vessels General Arnold Chasse, La. The 32-inch CSD will immediately begin work on Phase Four of the Corpus Christi Ship Channel Improvement Project. The project will bene? cially reuse 100% of the dredged material removed from the channel deepening and widening. The General Arnold is the newest,
-
 )
April 2024 - Marine News page: 31
)
April 2024 - Marine News page: 31McAllister Towing Grace McAllister, one of three sisters from Washburn & Doughty. ered WINDEA Courageous, the ? rst of three CTVs for an earlier contract with Windea CTV LLC. Other shipyards known to be build- ing CTVs at the moment include Blount Boats and Sensesco Marine, both in Rhode Island
-
 )
April 2024 - Marine News page: 30
)
April 2024 - Marine News page: 30Feature Shipbuilding Crowley Crowley’s electric tug eWolf, built by Master Boat Builders. Administration (MARAD) put a cost of $97 million on the ulatory ? lings, the vessel “is expected to be delivered and vessel. The same yard has also been contracted to build an operational in 2025.” Filings with
-
 )
April 2024 - Marine News page: 27
)
April 2024 - Marine News page: 27Feature Shipbuilding Loumania Stewart / U.S. Coast Guard focus), which require very different business systems to be in place. “We’ve been able to do both,” he said, noting that having systems in place for government jobs makes East- ern Shipbuilding “move-in ready for the Navy and other DOD agencies
-
 )
April 2024 - Marine News page: 24
)
April 2024 - Marine News page: 24Feature Navigation cables, 9 miles of cables connecting substations and up to blurred, undependable information for vessel crews. two export transmission cables with “associated secondary In the fairways Notice, the USCG references the NAS cable protection” (text is from the permit) within a 42-mile-
-
 )
February 2024 - Marine News page: 40
)
February 2024 - Marine News page: 40Vessels HOS Warhorse & HOS Wild Horse shipyard construction contracts were wrongfully termi- nated. Gulf Island and Hornbeck settled in October 2023, clearing way for the builds to be completed by another yard. Eastern secured the contract to complete the builds from Zurich American Insurance Company
-
 )
February 2024 - Marine News page: 23
)
February 2024 - Marine News page: 23Passenger Vessel Safety occur on a sightseeing vessel or an Ohio River dinner cruise? This contrast between speci? c – sometimes very speci? c – and general comes to mind when considering the numerous safety advisories pertaining to recent amphibious DUKW boat tragedies or the 2019 Conception dive boat
-
 )
February 2024 - Marine News page: 8
)
February 2024 - Marine News page: 8By the Numbers © Dragon Claws / Adobe Stock Rebuilding the Foundations of US Offshore Wind By Philip Lewis, Director of Research, Intelatus Global Partners As we enter a New Year, the memories of the shocks to with a potential of 3.3-6.3 GW in Delaware and Chesa- the foundations to the U.S. offshore wind
-
 )
January 2024 - Marine Technology Reporter page: 59
)
January 2024 - Marine Technology Reporter page: 59All images courtesy Oceanology International participants and to deliver another packed three days of exhi- Oi24 Events and Features bition and conference activity, features, workshops and one- Oceanology International is able to capitalize on the advan- to-one meetings.” tages of ExCeL’s expansive 18
-
 )
January 2024 - Marine Technology Reporter page: 37
)
January 2024 - Marine Technology Reporter page: 37an online dashboard will convey ? ndings and share stories. GETTING UNDERWAY Sailing to remote parts of the ocean between June and Oc- “A modern-day warrior is not about war. It’s about the per- tober, Ocean Warrior intends to cover 10,000 nautical miles son—honesty, integrity, empathy, intelligence
-
 )
January 2024 - Maritime Reporter and Engineering News page: 41
)
January 2024 - Maritime Reporter and Engineering News page: 41In the Shipyard Latest Deliveries, Contracts and Designs Van Oord Upgrades Heavy-lift Gulf Craft, Incat Crowther an Oord’s heavy-lift installation vessel Team on Virgin Island Ferry VSvanen will receive a major upgrade: the gan- try crane will be extended by 25m, making the vessel ready to handle the
-
 )
December 2023 - Maritime Reporter and Engineering News page: 36
)
December 2023 - Maritime Reporter and Engineering News page: 36G REAT of HIPS S 2023 Eastern Shipbuilding OPC: A “G -C ”AME HANGER he much-needed replacement for the Coast The OPC is based on the Vard Marine Inc., VARD 7 110 Guard’s long-serving medium endurance cut- Offshore Patrol Vessel design. Vard has been working with ters (WMECs) took a giant step closer
-
 )
December 2023 - Maritime Reporter and Engineering News page: 33
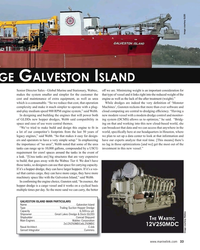
)
December 2023 - Maritime Reporter and Engineering News page: 33Image courtesy GLDD DGE ALVESTON SLAND G I Senior Director Sales - Global Marine and Stationary, Wabtec, off we are. Minimizing weight is an important consideration for makes the system smaller and simpler for the customer the that type of vessel and it links right into the reduced weight of the cost
-
 )
December 2023 - Maritime Reporter and Engineering News page: 32
)
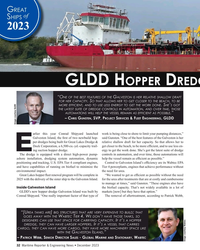
December 2023 - Maritime Reporter and Engineering News page: 32G REAT of HIPS S 2023 GLDD H DOPPER REDG NE OF THE BEST FEATURES OF THE ALVESTON IS HER RELATIVE SHALLOW DRAFT FOR HER CAPACITY O THAT ALLOWS HER TO GET CLOSER TO THE BEACH TO BE MORE EFFICIENT AND TO USE LESS ENERGY TO GET THE WORK DONE HE S GOT THE LATEST SUITE OF DREDGE CONTROLS IN AUTOMATION AND
-
 )
December 2023 - Maritime Reporter and Engineering News page: 2
)
December 2023 - Maritime Reporter and Engineering News page: 2NO.12 / VOL. 85 / DECEMBER 2023 18 Photo on the Cover: Royal Caribbean Group | Photo this page: FMD 18 Robots in the Engineroom Departments Fairbanks Morse Defense is developing robotics in-house to address the US 4 Authors & Contributors Navy’s need for future autonomous vessels. 6 Editorial By Greg
-
 )
November 2023 - Marine News page: 49
)
November 2023 - Marine News page: 49R.B. WEEKS Eastern Shipbuilding Group Florida shipbuilder Eastern Ship- rier islands and nourishing beaches an electrical power, propulsion, and building Group (ESG) this Spring de- lost to erosion, aiding the U.S. Army dredge machinery package by Royal livered R.B. Weeks, a 8,550 cubic yard Corps of
-
 )
November 2023 - Marine News page: 48
)
November 2023 - Marine News page: 48Feature Great Vessels of 2023 Great Lakes Dredge & Dock Corporation GALVESTON ISLAND Delivered this year amid an ongoing dredge building ed by a USCG requirement for crawl spaces around the boom in the United States, Galveston Island is the ? rst tanks in the event of a leak, Webb noted. “[Urea tanks
-
 )
November 2023 - Marine News page: 10
)
November 2023 - Marine News page: 10By the Numbers Jones Act Dredging Commercial Fleet Orderbook Over Past Five Years CompanyDredge NameDredge TypeCapacityShipyardStatus Manson ConstructionFrederick PaupHopper15,000 cyKeppel AmFELS (TX)Expected delivery Q4 2023 Cashman DredgingMighty QuinHopper (T&B)4,000 cyFeeny’s Shipyard (NY)In service
-
 )
November 2023 - Maritime Reporter and Engineering News page: 58
)
November 2023 - Maritime Reporter and Engineering News page: 58PORT FUNDING The ports authority found success by tailoring its projects to city has already submitted one Port Infrastructure Develop- the requirements of the grants programs. For example, for the ment Program grant and is positioned for other prospects to Colonel's Island Terminal needed to increase
-
 )
November 2023 - Maritime Reporter and Engineering News page: 52
)
November 2023 - Maritime Reporter and Engineering News page: 52PHILIPPINE'S FASTCAT FERRIES “[Hong Kong mogul] Sir Gordon Wu came to our of? ce, and we also went to his of? ce in Hong Kong; he was interested to get into this business. He told me: ‘Mary Ann, as long as there's water, you have business. The name of the game is ef? ciency.’ So I guess the challenge
-
 )
November 2023 - Maritime Reporter and Engineering News page: 51
)
November 2023 - Maritime Reporter and Engineering News page: 51PHILIPPINE'S FASTCAT FERRIES Hitting bottom did not mean quitting, and the decision was made to change its course. “We will give our country what it needs – safe maritime transportation,” said Mary Ann. So in 2010 the company switched gears and decided to take the plunge and invest in new, modern tonnage.