Unmanned Surface
-
- SailBuoy Unmanned Surface Vehicle for Ocean Monitoring Marine Technology, Apr 2013 #38
(1) Oceanic Platform of the Canary Islands (PLOCAN). PO Box 413, Telde. Spain; (2) Christian Michelsen Research (CMR). PO Box 6031, Bergen, Norway; (3) Instituto Canario de Ciencias Marinas (ICCM). PO Box 56, Telde. Spain
Ocean observatories play a crucial role in relevant aspects of the climate system on longer time-scales, including among others, global heat budget, sea level rise, potential variations in the meridional overturning circulation, and long-term storage of climatically relevant compounds such as CO2. Expanding the ocean observing system towards being truly global will require an increased commitment to the design and implementation of technologies for collecting offshore and deep ocean data and transmitting them to shore in a useful and cost effective manner. By definition, ocean observatories usually include a broad and multidisciplinary range of fix and mobile autonomous platforms, from underwater vehicles to sea-bottom seismic networks, including moored surface and subsurface buoys, floats or drifters. Most of them are designed to provide continuous, or at least periodic, field data over a long-time period in near-real time.
The European Station for Time-Series in the OCean -ESTOC- is currently joining the global ocean monitoring strategy as site-partner of baseline initiatives such as EuroSites, ICOS, ESONET or EMSO. Placed 60 nautical miles off Northwards Gran Canaria island at 29º 10’ N, 15º 30’ W with a depth of 3685 m., is still operational since 1994 through a permanent observing program addressed to monitor biochemical seawater parameters variability over time using a wide in-situ sampling methodologies and instruments i.e. research vessels, VOOP, moorings, turtles, drifters, underwater gliders, among others.
ESTOC is located in the North Atlantic Sub-tropical Gyre and exhibits oligotrophic characteristics. The circulation is driven by the southward-flowing Canary Current and the NE Trade Winds. A clear seasonality is recognizable when upper layer temperature reveals warming during the Summer season and cooling during Winter. Nowadays the site is managed by the Oceanic Platform of the Canary Islands -PLOCAN- through a multidisciplinary set of in-situ monitoring autonomous platforms, where unmanned surface and underwater vehicles develop a special role.
PLOCAN is a multi-purpose public consortium infrastructure engaged for research, technology development and innovation in the marine and maritime sectors. Its main goal is to promote long-term and sustainable ocean observations, providing a cost-effective bend of services as test site, observatory, underwater vehicles base, as well as training and innovation hub.
In this regards, PLOCAN focuses on international and interdisciplinary networking and partnership activities with key-baseline research institutions and companies in the field of marine and maritime technology. The norwegian company Christian Michelsen Research -CMR- Instrumentation, represents a suitable example in this sense. CMR is a highly specialized company for the design and development of groundbreaking ocean instrumentation specially addressed for harsh environments, being one of its products the autonomous unmanned ocean vessel, SailBuoy.
The SailBuoy Technology
The SailBuoy is a small unmanned wind-driven ocean vessel able to travelling across the oceans for extended periods of time. It navigates autonomously, controlled by Iridium satellite link communications, transmitting data in real time underway. Since Iridium is a 2-way communication system, commands such as new waypoints, tracks and sensor parameters can be easily sent to the vessel underway. The SailBuoy can be fitted in a highly modular way with a wide variety of instrumentation payloads able to be used for a broad number of ocean applications. It can easily keep station or travel from point to point.
The high modularity level offered by this technology allows to integrate a broad number of sensors engaged to monitor parameters like i.e. water temperature, conductivity, dissolved oxygen, heave (wave height), fluorometer, chlorophyll in vivo, blue green algae, crude oil, current, wind, air pressure. hydrophone, echo sounder, among others. Therefore, a wide range of scientific and industrial direct applications are able to SailBuoy’s users, i.e. climate science, oceanography, meteorology, seismic monitoring, marine mammal monitoring, algae tracking, wave measurement, emission monitoring, fisheries management, aquaculture, visual inspection, subsea communication, transportation,... among others.
The Mission: Goal and Description
The mission’s goal focused on testing and evaluating technical aspects of the navigation and sampling site from the SailBuoy technology for a first time in subtropical areas as it is the Canary Islands archipelago, while to improve the ESTOC’s monitoring program strategy. The mission was performed through the surrounding waters of ESTOC site and the channel between Gran Canaria and Fuerteventura Islands with the SailBuoy unit SB02.
For this specific purpose, SB02 was fitted with a payload sensor configuration that include a Neil Brown’s G-CTD for water conductivity and temperature, and an AADI Optode 4835 -shallow water version- for dissolved oxygen measurements. Sampling rate was ½ hour for most of the time and increased to hour during starting and ending mission periods.
Piloting tasks were time-sharing carried out between skilled technical staff from CMR and PLOCAN through a dedicated user interface directly linked to the Iridium satellite system. Despite the high marine traffic density usually existing in central areas of the Canary Islands archipelago (specially Las Palmas harbour surroundings), SB02’s piloting was performed without any noteworthy issue, even crossing several times some of the main cargo and oil-tanker shipping lines in the area. The gathered sea-state conditions were under a wide Beaufort and Douglas range variability (from 0 to 7 and 0 to 5, respectively), where wind speed varied from 0-29 Knots and wave height from 0-3.2 meters. The overall distance sailed was 460 Nm along 22 days mission, from 13th November to 5th December 2012. During this period of time, SB02 sailed windward 75% and 25% leeward, being required for that purpose several tack maneuvers. The maximum speed value reached was 3 Knots being the average 0.85 Knots for the whole performed mission. A total of nine waypoints were required to pilot SB02 properly according to the navigation needs and existing wind and sea-state conditions. SB2 was deployed off Southwards Gran
Canaria and recovered three weeks later few nautical miles off La Isleta, at the Northeast coast of the previously mentioned island.
SailBuoy’s piloting requirements are very few. Only a web browser over internet is required. In terms of tasks, first one is to define the target waypoint and setup the desired and safer path to follow. The path should avoid as best as possible shipping lanes, staying away from the coast and trying to sail as inside the strongest wind zones as possible. A standard piloting procedure is to decide a destiny waypoint and a corridor width that depends on the sea and wind conditions. The corridor width is the SailBuoy’s horizontal deviation along the ideal straight line track.
A standard value of 10 km radius is used allowing SB02 to sail diagonally from the ideal track, having space to manoeuvre and not forcing her to tackle so often, saving power. This value should be reduced when crossing a dangerous zone, to keep tight the path.
On daily basis, checking the SailBuoys status (GPS location and sensors output values), wind forecast maps and marine traffic are the must-do tasks. The wind maps will give an approximation of how SailBuoy will behave, and if the Waypoint should change according to wind forecast. Sometimes is not possible to avoid shipping lanes, but one should try to predict traffic densities and cross the lane in the hours when there is the least amount of traffic. If it is necessary to change the waypoint or the radius, the commands are also sent via this web interface. Finally, data is displayed on a table for NRT analysis, but it can be easily downloaded and imported to any data processing software tool.
Conclusions
A SailBuoy unit has been tested for first time in subtropical latitudes with successful results in operational and scientific terms. Sea-state conditions along the mission were highly variable, from calm to Beaufort 7 and Douglas 5, enabling to test the vehicle in different work-sailing scenarios. Biofouling effect was an issue to consider only in few and specific hull places. Piloting tasks were easy and successfully performed despite marine traffic density at certain times and opposite sea-state conditions when calm. Gathered scientific data allowed to clearly identify the startup of the decline in the annual temperature pattern, while identify monitoring synergies between autonomous platforms in ocean observatories as is ESTOC, with special relevance in terms of surface and underwater unmanned vehicles. SailBuoy can be considered an efficient, rugged and affordable device for autonomous in-situ and real-time surface ocean monitoring. Baseline partnership collaboration between CMR and PLOCAN through SB02 mission has been mutually helpful and successful for both sides.
Acknowledgments
The authors want to acknowledge all institutions, companies and people involved in this challenging mission, with special mention to the EU-FP7 Program for funding the GROOM project within this mission has been partially carried out. Also to thank technological partners like Grafinta SA for their support and collaboration. A special mention also to Las Palmas and Tenerife Harbourmasters authorizing the mission performance across to the described Canarian waters.(As published in the April 2013 edition of Marine Technologies - www.seadiscovery.com)
-
- Unmanned Surface Vessels Marine Technology, May 2013 #24
Locked and Loaded for Hydrographic Missions In recent years, the proliferation of unmanned surface vessels deployed for hydrographic missions has mushroomed as the collaborative effects of propulsion, software and sensor technologies has cumulatively made these vessels, large and small, more capable for a
-
- Unmanned Surface Vessels: Wave Glider SV3 Marine Technology, May 2013 #32
Locked and Loaded for Hydrographic Missions In recent years, the proliferation of unmanned surface vessels deployed for hydrographic missions has mushroomed as the collaborative effects of propulsion, software and sensor technologies has cumulatively made these vessels, large and small, more capable for a
-
- Unmanned Surface Vessels: C-Stat Mobile Buoy USV System Marine Technology, May 2013 #34
Locked and Loaded for Hydrographic Missions In recent years, the proliferation of unmanned surface vessels deployed for hydrographic missions has mushroomed as the collaborative effects of propulsion, software and sensor technologies has cumulatively made these vessels, large and small, more capable for a
-
- Unmanned Surface Vessels: From Concept to Service Maritime Reporter, Feb 2016 #42
Over the next decade the maritime sector is likely to see one of the largest changes since sail gave way to steam. Unmanned Surface Vehicles (USV) are now being considered for various marine roles and the drivers for rapid development are significant. Unmanned or autonomous vessels have passed through
-
- MTR 100: ASV Marine Technology, Sep 2014 #91
of unmanned marine systems, pushing the boundaries of autonomous technology. With a team of 40 people, ASV have designed and built more than 50 Unmanned Surface Vehicles (USVs) which operate globally in the commercial and military sectors. The Profile Committed to building advanced, innovative unmanned
-
- MTR100 '13 Deep Ocean Engineering Marine Technology, Jul 2013 #12
.com Deep Ocean Engineering, Inc. is a technology-based engineering and manufacturing company that provides Remotely Operated Vehicle (ROV) and Unmanned Surface Vehicle (USV) solutions. Deep Oceans Engineering’s ROV and USV systems have been utilized in a broad range of industr: security, military, nuclear
-
- Interview: Chris Deegan, President & Chief Executive, Gibbs & Cox Marine News, Jun 2021 #10
Variant Littoral Combatant Ship (LCS) Design Agent for Lockheed Martin, FFG-62 Constellation Class Agent for Fincantieri Marinette Marine, Medium Unmanned Surface Vehicle (MUSV) for L3 Harris, Large Unmanned Surface Vehicle (LUSV) prime, LPD 17 Flight 2 Program Office (PMS 317), Naval Sea Systems Command
-
- Wave-Propelled Vessel Debuts Marine Technology, Apr 2014 #50
Vessels) Ltd. for very long endurance autonomous data gathering the 3.5m AutoNaut also harvests solar energy at sea to power its electronics. The new unmanned surface vessel (USV) uses motion from the ocean to propel itself, silently, with stability and zero emissions. Fresh back from sea trials with AutoNaut
-
- MTR100: Greensea Marine Technology, Aug 2016 #32
technology patent-pending OPENSEA software platform, Greensea has transformed vehicles into fully integrated systems across the marine industry – manned, unmanned, surface, subsea. Using the OPENSEA operating platform, Greensea has developed commercially available navigation and control products that are flexible
-
- Drill Rig Noise: Entering the Exclusion Zone, Quietly Marine Technology, Mar 2020 #24
Unmanned surface vessels continue to make in-roads into new applications and industries. An ability to gather data in otherwise inaccessible locations is both increasing knowledge about marine noise and confidence in marine autonomous systems in the oil and gas industry. Elaine Maslin reports.Offshore oil
-
- A USV Franchise Grows Strong in Abu Dhabi Maritime Reporter, Feb 2013 #34
and capabilities inland, near-shore and at sea, Maritime Reporter & Engineering News last month was on hand in Abu Dhabi for the unveiling of a new Unmanned Surface Vessel family. If it delivers as designed, it will revolutionize marine robotic vehicle applications for both military and commercial purposes
-
 )
March 2024 - Marine Technology Reporter page: 44
)
March 2024 - Marine Technology Reporter page: 44NEW TECH OCEANOLOGY INTERNATIONAL 2024 Image courtesy Metron/Cellula Teledyne Marine acquires Valeport: Matt Quartley, MD, Valeport and Ole Søe-Pedersen, VP & Image courtesy Teledyne Marine GM Teledyne Marine announce the deal in London. Pictured (L-R): Cellula Robotics, President, Eric Jackson, Metron
-
 )
March 2024 - Marine Technology Reporter page: 40
)
March 2024 - Marine Technology Reporter page: 40NEW TECH OCEANOLOGY INTERNATIONAL 2024 All photos courtesy MTR unless otherwise noted NEW TECH, PARTNERSHIPS LAUNCH IN LONDON With Oceanology International now one month in the rear-view mirror, MTR takes a look at some of the interesting technologies launched before, during and after the London event.
-
 )
March 2024 - Marine Technology Reporter page: 39
)
March 2024 - Marine Technology Reporter page: 39and the leads brought out to the CBA V. The CBA V can perform a Power Pro? le, useful for designers working with solar charging systems on buoys and unmanned surface vehicles (USV). For very low currents, continuous or intermittent, the West Mountain Radio CBA HR (High Resolution) model is designed to
-
 )
March 2024 - Marine Technology Reporter page: 37
)
March 2024 - Marine Technology Reporter page: 37miscible barrier ? uid heavier than seawater (sg=1.026) and lighter than the battery electrolyte (sg=1.265). The original cell vent cap was screwed into the top of the riser pipe to vent the gases associated with charging. Wires were soldered to the lead (Pb) posts. The lead-acid battery was additionall
-
 )
March 2024 - Marine Technology Reporter page: 36
)
March 2024 - Marine Technology Reporter page: 36LANDER LAB #10 Of special interest for marine applications, LiPo batteries are Shipping any kind of lithium battery can be a challenge, and offered in a “pouch” design, with a soft, ? at body. The pouch IATA regs vary with the batteries inside or outside an instru- is vacuum-sealed, with all voids ?
-
 )
March 2024 - Marine Technology Reporter page: 34
)
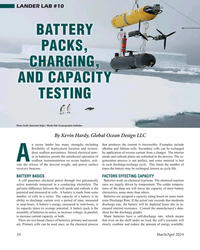
March 2024 - Marine Technology Reporter page: 34LANDER LAB #10 BATTERY PACKS, CHARGING, AND CAPACITY TESTING Photo Credit: Hanumant Singh / Woods Hole Oceanographic Institution. By Kevin Hardy, Global Ocean Design LLC n ocean lander has many strengths including that produces the current is irreversible. Examples include ? exibility of deployment
-
 )
March 2024 - Marine Technology Reporter page: 33
)
March 2024 - Marine Technology Reporter page: 33regulated industry in the world.” How- ever, commercial success depends on many factors, not least a predictable OPEX. Over the past four years, SMD has worked with Oil States Industries to calculate cost per tonne ? gures for prospective customers. Patania II uses jet water pumps to Oil States’
-
 )
March 2024 - Marine Technology Reporter page: 31
)
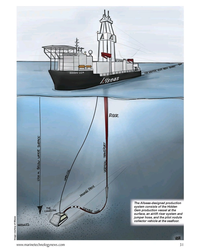
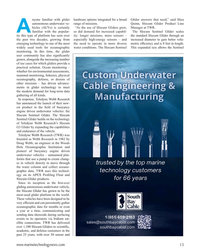
March 2024 - Marine Technology Reporter page: 31The Allseas-designed production system consists of the Hidden Gem production vessel at the surface, an airlift riser system and jumper hose, and the pilot nodule collector vehicle at the sea? oor. Image courtesy of Allseas www.marinetechnologynews.com 31 MTR #3 (18-33).indd 31 4/4/2024 2:12:41
-
 )
March 2024 - Marine Technology Reporter page: 25
)
March 2024 - Marine Technology Reporter page: 25Auerbach explained that ideally, “one ? ed layers of geothermal activity,” noted changes over an area of 8,000 km2. They would have both instruments: seismom- Skett, “and the change in salinity and dis- found up to seven km3 of displaced ma- eters to detect and locate subsurface ac- solved particles for
-
 )
March 2024 - Marine Technology Reporter page: 20
)
March 2024 - Marine Technology Reporter page: 202024 Editorial Calendar January/Februay 2024 February 2024 March/April 2024 Ad close Jan.31 Ad close March 21 Ad close Feb. 4 Underwater Vehicle Annual Offshore Energy Digital Edition ?2?VKRUH:LQG$)ORDWLQJ)XWXUH ?2FHDQRJUDSKLF?QVWUXPHQWDWLRQ 6HQVRUV ?6XEVHD'HIHQVH ?6XEVHD'HIHQVH7KH+XQWIRU ?0DQLS
-
 )
March 2024 - Marine Technology Reporter page: 13
)
March 2024 - Marine Technology Reporter page: 13Research in 1982 by Doug Webb, an engineer at the Woods Hole Oceanographic Institution and pioneer of buoyancy engine driven underwater vehicles – unmanned plat- forms that use a pump to create chang- es in vehicle density to move through the water column and collect oceano- graphic data. TWR uses this
-
 )
March 2024 - Marine Technology Reporter page: 9
)
March 2024 - Marine Technology Reporter page: 9will as- bear, such as the Raytheon Barracuda, a small AUV that can sist in localizing moored mines, airborne MCM rotorcraft uti- be deployed from an unmanned surface vessel (USV) to both www.marinetechnologynews.com 9 MTR #3 (1-17).indd 9 4/4/2024 8:52:46 A
-
 )
March 2024 - Marine Technology Reporter page: 6
)
March 2024 - Marine Technology Reporter page: 6President PhD, Rear Admiral, U.S. of Global Ocean Design, Navy (ret) is the CEO of creating components and Ocean STL Consulting and subsystems for unmanned host of The American Blue vehicles, following a career Economy Podcast. He serves at Scripps Institution of on several boards, is a fellow Oceanograp
-
 )
March 2024 - Marine Technology Reporter page: 2nd Cover
)
March 2024 - Marine Technology Reporter page: 2nd CoverSMART SUBSEA SOLUTIONS • Delivering data in most adverse conditions: underwater acoustic modems with advanced communication technology and networking • Accurate USBL, LBL and hybrid positioning of underwater assets, navigation for divers • Modem emulator and multiple cost-saving developer tools • Sonobot
-
 )
April 2024 - Maritime Reporter and Engineering News page: 27
)
April 2024 - Maritime Reporter and Engineering News page: 27RADM PHILIP SOBECK, MILITARY SEALIFT COMMAND With COVID, we had to make some hard choices for our Do your CIVMARs have upward mobility? mariners because we couldn’t rotate. Many of our mariners The Navy has Sailors who become “Mustangs,” and work found other employment, and were able to use their skills
-
 )
April 2024 - Marine News page: 39
)
April 2024 - Marine News page: 39There are ? ve major paint catego- lenges in shipyards is managing small building is a multifaceted endeavor ries in new construction shipbuilding: parts, which are prone to surface rust that demands integrative systems before installation. Optimizing the planning, as well as adoption of new 1.
-
 )
April 2024 - Marine News page: 38
)
April 2024 - Marine News page: 38Tech File Optimizing Blast and Paint Processes in New Construction Shipbuilding By Colin Gallagher, Director of Shipyard Optimization, BlastOne International The ef? cacy of surface preparation and coating appli- 1. Raw material entry cation in the new construction shipbuilding industry is 2. Painting
-
 )
April 2024 - Marine News page: 37
)
April 2024 - Marine News page: 37Feature Electric Tugs could change down the road. “What do we really need an In San Diego, eWolf’s transits will typically run 20-30 engineer to do? There are no moving parts. So, how does minutes, “not the optimal operation to really see a lot of that [role] change? How does that change where we work?
-
 )
April 2024 - Marine News page: 23
)
April 2024 - Marine News page: 23the rule new projects might be set within historical vessel routes, con? icting with existing maritime uses and users. The USCG’s fairway proposal is based on BOEM’s exist- ing WEA projections (contained in the December Notice). The 18 proposed fairways, traf? c separation schemes and precautionary
-
 )
February 2024 - Maritime Reporter and Engineering News page: 25
)
February 2024 - Maritime Reporter and Engineering News page: 25blends. Wabtec also is in- from a maintenance perspective to allow The ever-changing regulatory land- vesting in low carbon fuel technologies longer unmanned operation. In 2022 we scape on fuels and making sure that we through its’ alternative fuels programs released a new technology to our engine,
-
 )
February 2024 - Maritime Reporter and Engineering News page: 16
)
February 2024 - Maritime Reporter and Engineering News page: 16THE PATH TO ZERO Methanol’s Superstorage Solution Technical inquiries to SRC Group ramped up after it received Approval in Principle (AIP) for a concept which ‘reinvented methanol fuel storage’ on board ships. Delivering the answers has seen technical talk converting into project discussions
-
 )
February 2024 - Maritime Reporter and Engineering News page: 11
)
February 2024 - Maritime Reporter and Engineering News page: 11down to a smaller size, and especially a smaller width relieves waterfront infrastructure footprints and costs. that issue. One may argue that one human with a bigger truck These 5-foot wide units will zip through the city much faster can deliver more cargo than one human with a smaller truck, and
-
 )
January 2024 - Marine Technology Reporter page: 4th Cover
)
January 2024 - Marine Technology Reporter page: 4th CoverThe right tool for remote sensing the Slocum G3 Glider Slocum Gliders are the world’s most proven and reliable buoyancy-driven unmanned long- endurance remote sensing vehicle. Boasting the broadest range of available sensors, operations in any sea state, and the endurance for deployments of up to a year
-
 )
January 2024 - Marine Technology Reporter page: 3rd Cover
)
January 2024 - Marine Technology Reporter page: 3rd CoverSMART SUBSEA SOLUTIONS Delivering data in most adverse conditions: underwater acoustic modems with advanced communication technology and networking Accurate USBL and LBL positioning of underwater assets Modem emulator and other cost-saving developer tools Autonomous surface vehicle for bathymetry, monitoring