Underlying Technologies
-
- Untethered Vehicle Tech Continues to Advance Autonomy Marine Technology, Mar 2020 #20
Social distancing is a new fact of life for most, but not long-ago technical conferences brought experts together. In early February, Underwater Intervention provided a series of presentations on developments in untethered vehicles. A powerful trend was the increasing level of “autonomy” found in the sector. While not all the presentations addressed this theme, several helped clarify the many ways this “buzzword” is advancing the capabilities of untethered marine vehicles.
Kongsberg Maritime offered two presentations: “How Autonomous is Your AUV” presented by Richard Mills and “Autonomous Technology for Ocean Exploration,” by Arnt Olsen. Together these presentations used the context of Kongsberg’s vehicles, especially the Hugin AUV and the Sounder USV, to discuss what autonomous technology means, and is capable of. In the case of the USV there is a clear spectrum of operator control. This has four stages: 1) it begins at line of sight remote control in which an operator uses a hand held remote control for docking and harbor maneuvering; 2) it moves on to remote control beyond line of sight, where an onshore operator controls the voyage and makes changes to speed, heading, and other onboard systems; 3) in supervised mode the USV will follow a pre-set mission plan which the operator may change during the mission; 4) the final stage is fully autonomous where the USV will solve the tasks set in the mission plan, make decisions by itself, and avoid collisions. While this spectrum may be readily apparent to practicing UUV users, it provides a useful construct to discuss the underlying technologies that enable a USV.
Key elements to successful USV operations include: direct vehicle control and fleet management, a USV world model, and image recognition. The first is perhaps most obvious and a relatively direct transition from crewed vessel operations. But the second and third elements are quite sophisticated. A USV world model draws upon a three-dimensional world model, geo-referencing, image recognition, sensor fusion, and overall evaluation of this model via machine learning and artificial intelligence techniques.
 A USV Demands a spectrum of control and “autonomy” (Credit: Kongsberg Maritime)
A USV Demands a spectrum of control and “autonomy” (Credit: Kongsberg Maritime)Kongsberg’s AUV presentation also addressed these ideas. In that case they have a similar spectrum of autonomy. It begins with mission autonomy, getting from A to B, following a route/mission plan, and managing sensors. The next level is advanced autonomy including reactive behavior, collision avoidance, and mission tasks such as following a pipe. The highest level of function is adaptive autonomy for actions such as proactive behaviors, on-board decision making, and adjusting mission outcomes. This culminates in a perspective of nested capabilities, including deep learning, machine learning, and true artificial intelligence.
EIVA’s Antonio Felipe Siva presented “Visually Aided Navigation and Automated Subsea Inspection Using Deep Learning and Computer Vision” a briefing on how their software employs machine learning. In particular they use it for advanced subsea feature tracking. They recently released a paper describing a new feature detection algorithm that outperforms current algorithms in the market, which will be used in their software tools. The software tools can generate a three-dimensional mesh from any point cloud or sonar, and from analyzed video data. The end product is a “3D mesh” with the “full resolution of the image” even though the underlying point-cloud has been reduced.
 EIVA’s Software Output Showing sonar and video data “mesh” (Credit: EIVA)
EIVA’s Software Output Showing sonar and video data “mesh” (Credit: EIVA)Another presentation of novel ideas came from Terradepth’s Ken Childress. This new startup in Austin, Texas is pioneering a networked systems approach for ocean data collection. Their approach aims to extend mission duration with high power payload capacity while limiting offshore personnel through autonomous data collection and quality assurance. They also aim to reduce staffing onshore with autonomous data processing.
A key in this vision is efficiency with scale of operations and reliability from many interchangeable vehicles, which they term AxVs.
The Terradepth Concept of Operations (CONOPS) includes: 1) surface and subsurface capability, 2) two or more identical vehicles, 3) launch from shore or sea, 4) open ocean transit to survey site, 5) extended time at sea, 6) multi-vehicle cooperation, and 7) Precision data gathering. This is executed via a single configuration of hybrid autonomous marine vehicle surface and subsurface system. Terradepth has a patent pending for this CONOPS and is currently preparing for initial demonstrations in mid-2020. In this concept the individual AxVs employ autonomy concepts similar to the AUV and USV ideas discussed by Kongsberg. But the overall network also offers opportunities for new approaches to fleet management and individual AxV tasking.
While the Terradepth ideas are based on new vehicle designs and Kongsberg focused on discussing the software/autonomy elements of unmanned maritime systems, another new entrant addressed both. Stone Aerospace is also based in Austin, Texas. After many years of specialty research and development projects, most funded by NASA, they introduced their first commercial concept, Sunfish, in a briefing by Kristof Richmond, “Demonstrations of a human-portable hovering AUV for complex 3D environments.” This addressed both a new AUV design and a powerful software offering.
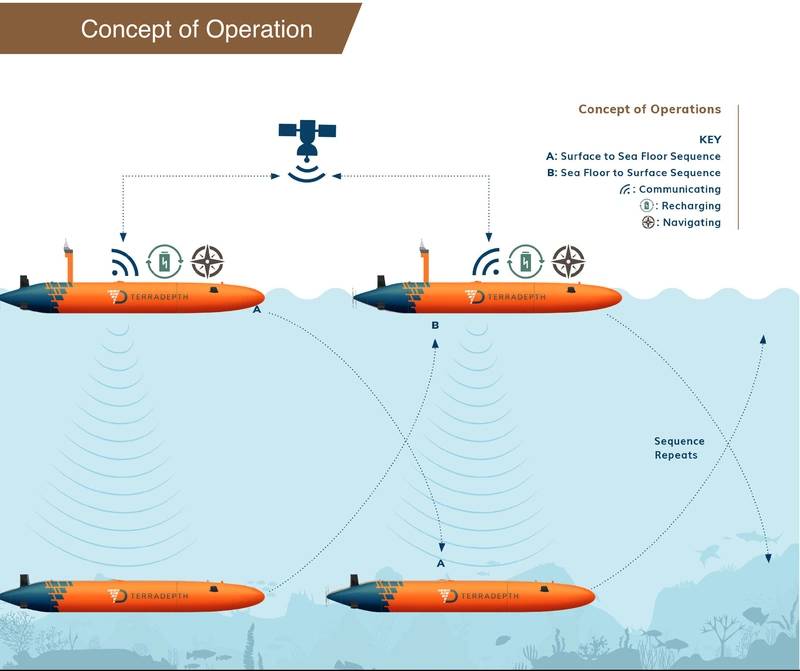 The AxV Concept of Operations (Credit: Terradepth)
The AxV Concept of Operations (Credit: Terradepth)The vehicle itself is described as able to fly like a jet and hover like a helicopter. It is a person-portable system that addresses many challenges of autonomous exploration in complex environments. The AUV is designed to operate in a wide variety of undersea environments, ranging from man-made, such as piers or harbors, to natural, reefs or caves. The core vehicle is 1.6 meters long, 0.47 meters wide and only 0.2 meters high. At 50 kilograms in weight the system is highly portable. SUNFISH can stop in mid “flight,” hover, and perform proximity operations along objects it has mapped and do so at specified stand-off ranges while acquiring high-resolution photos and geometry. This precision, combined with sophisticated artificial intelligence, makes SUNFISH ideal for complex and combined environments.
During operations SUNFISH can report back, using an optional data-only tether, allowing a surface-based team to review, and re-task the vehicle. The system can also operate fully autonomously. While the mechanical design of the AUV is interesting, it is the powerful software onboard that is truly innovative. This vehicle employs field proven Artificial Intelligence (AI) and Simultaneous Localization and Mapping (SLAM).
This capability has been used in a series of tests and demonstrations in unstructured labyrinthine cave environments. SUNFISH was able to autonomously explore this environment, creating a real-time map which it used to navigate through the cave. SUNFISH has explored numerous caves, making a map as it proceeds. The robot was then able to autonomously find its way back to the starting point using the map it had just created.
Throughout these presentations the UUV Track served to showcase the growing power of software in new un-crewed marine vehicles. There remains a great deal of room to discuss and define terms such as autonomy, artificial intelligence, machine learning, SLAM, and other terms of art. But regardless of the definitions the new capabilities coming to all manner of ocean robots are impressive. New hardware and software ideas are driving innovation and shaping the future of untethered vehicles in the maritime industry.
 SUNFISH, a new inspection AUV. (Credit: Stone Aerospace)
SUNFISH, a new inspection AUV. (Credit: Stone Aerospace)
-
 )
March 2024 - Marine Technology Reporter page: 48
)
March 2024 - Marine Technology Reporter page: 48Index page MTR MarApr2024:MTR Layouts 4/4/2024 3:19 PM Page 1 Advertiser Index PageCompany Website Phone# 17 . . . . .Airmar Technology Corporation . . . . . . . . . .www.airmar.com . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .(603) 673-9570 9 . . . . . .Birns, Inc. . . . . . . . . . .
-
 )
March 2024 - Marine Technology Reporter page: 47
)
March 2024 - Marine Technology Reporter page: 47PRODUCT, PROFESSIONAL, VESSELS, MTR BARGES & REAL ESTATE FOR SALE Marketplace INNOVATIVE. UNIQUE. PROVEN. ALLAMERICANMARINE.com ???????????????????????????????????????? 9??????????SiC A????????ArC????????????????S???????C?????????9???Ç????????? ????????????????Ý???????S???y???????????????????K???:???? MAR
-
 )
March 2024 - Marine Technology Reporter page: 45
)
March 2024 - Marine Technology Reporter page: 45ronments. The new agreement will address speci? c techni- cal gaps in the UUV defense and offshore energy markets especially for long duration, multi-payload mission opera- tions where communications are often denied or restricted. As part of the new alliance, Metron’s Resilient Mission Autonomy portfolio
-
 )
March 2024 - Marine Technology Reporter page: 43
)
March 2024 - Marine Technology Reporter page: 43Image courtesy Kongsberg Discovery Image courtesy Teledyne Marine New Products Teledyne Marine had its traditional mega-booth at Oi, busy start to ? nish. Image courtesy Greg Trauthwein offers quality sub-bottom pro? ling capability without the need tion of offshore windfarms. GeoPulse 2 introduces new
-
 )
March 2024 - Marine Technology Reporter page: 41
)
March 2024 - Marine Technology Reporter page: 41Image courtesy Outland Technology Image courtesy Exail Image courtesy Submaris and EvoLogics Vehicles The ROV-1500 from Outland Technology represents a leap forward in underwater robotics, a compact remotely operated vehicle (ROV) weighing in at less than 40 lbs (19kg) the ROV- 1500 is easy to transport
-
 )
March 2024 - Marine Technology Reporter page: 40
)
March 2024 - Marine Technology Reporter page: 40NEW TECH OCEANOLOGY INTERNATIONAL 2024 All photos courtesy MTR unless otherwise noted NEW TECH, PARTNERSHIPS LAUNCH IN LONDON With Oceanology International now one month in the rear-view mirror, MTR takes a look at some of the interesting technologies launched before, during and after the London event.
-
 )
March 2024 - Marine Technology Reporter page: 33
)
March 2024 - Marine Technology Reporter page: 33regulated industry in the world.” How- ever, commercial success depends on many factors, not least a predictable OPEX. Over the past four years, SMD has worked with Oil States Industries to calculate cost per tonne ? gures for prospective customers. Patania II uses jet water pumps to Oil States’
-
 )
March 2024 - Marine Technology Reporter page: 32
)
March 2024 - Marine Technology Reporter page: 32FEATURE SEABED MINING by a sea? oor plume from its pilot collection system test. pact, nodule collection system that utilizes mechanical and The Metals Company recently signed a binding MoU with hydraulic technology. Paci? c Metals Corporation of Japan for a feasibility study on The company’s SMD
-
 )
March 2024 - Marine Technology Reporter page: 30
)
March 2024 - Marine Technology Reporter page: 30FEATURE SEABED MINING bilical. It has passive heave compensation which nulli? es the necott. “The focus since then has been on scaling while en- wave, current and vessel motions that in? uence loads in the suring the lightest environmental impact,” says The Metals power umbilical. The LARS can
-
 )
March 2024 - Marine Technology Reporter page: 29
)
March 2024 - Marine Technology Reporter page: 29n January, Norway said “yes” to sea- bed mining, adding its weight to the momentum that is likely to override the calls for a moratorium by over 20 countries and companies such as I Google, BMW, Volvo and Samsung. Those against mining aim to protect the unique and largely unknown ecology of the sea?
-
 )
March 2024 - Marine Technology Reporter page: 27
)
March 2024 - Marine Technology Reporter page: 27SEA-KIT USV Maxlimer returning from HT-HH caldera in Tonga. © SEA-KIT International data and further assess ecosystem recov- ery. What is known, noted Caplan-Auer- bach, is that the impact of submarine vol- canoes on humans is rare. “The HT-HH eruption was a tragedy, but it was very unusual. It let us
-
 )
March 2024 - Marine Technology Reporter page: 26
)
March 2024 - Marine Technology Reporter page: 26FEATURE OCEANOGRAPHIC INSTRUMENTATION & SENSORS Kevin Mackay, TESMaP voyage leader and Center head of the South and West Paci? c Regional Centre of Seabed 2030. Kevin in the seismic lab at Greta Point looking at the Hunga Tonga-Hunga Ha’apai volcano 3D map completed with data from the TESMaP voyage
-
 )
March 2024 - Marine Technology Reporter page: 25
)
March 2024 - Marine Technology Reporter page: 25Auerbach explained that ideally, “one ? ed layers of geothermal activity,” noted changes over an area of 8,000 km2. They would have both instruments: seismom- Skett, “and the change in salinity and dis- found up to seven km3 of displaced ma- eters to detect and locate subsurface ac- solved particles for
-
 )
March 2024 - Marine Technology Reporter page: 23
)
March 2024 - Marine Technology Reporter page: 23elatively inactive since 2014, the Hunga Tonga–Hunga Ha‘apai (HT-HH) submarine volcano began erupting on December 20, 2021, reaching peak intensity on January 15, 2022. This triggered tsunamis throughout the Pa- R ci? c, destroyed lives and infrastructure, and generated the largest explosion recorded
-
 )
March 2024 - Marine Technology Reporter page: 20
)
March 2024 - Marine Technology Reporter page: 202024 Editorial Calendar January/Februay 2024 February 2024 March/April 2024 Ad close Jan.31 Ad close March 21 Ad close Feb. 4 Underwater Vehicle Annual Offshore Energy Digital Edition ?2?VKRUH:LQG$)ORDWLQJ)XWXUH ?2FHDQRJUDSKLF?QVWUXPHQWDWLRQ 6HQVRUV ?6XEVHD'HIHQVH ?6XEVHD'HIHQVH7KH+XQWIRU ?0DQLS
-
 )
March 2024 - Marine Technology Reporter page: 19
)
March 2024 - Marine Technology Reporter page: 19About the Author vey with the pipe tracker is not required, resulting in signi? - Svenn Magen Wigen is a Cathodic Protection and corrosion control cant cost savings, mainly related to vessel charter. expert having worked across The major advantage of using FiGS on any type of subsea engineering, design
-
 )
March 2024 - Marine Technology Reporter page: 18
)
March 2024 - Marine Technology Reporter page: 18TECH FEATURE IMR There are also weaknesses in terms of accuracy because of FiGS Operations and Bene? ts signal noise and the ability to detect small ? eld gradients. In Conventional approaches to evaluating cathodic protection this process there is a risk that possible issues like coating (CP)
-
 )
March 2024 - Marine Technology Reporter page: 17
)
March 2024 - Marine Technology Reporter page: 17• Integrity assessment, and otherwise covered, e.g., by rock dump. As for depletion of • Mitigation, intervention and repair. sacri? cial anodes, this can be dif? cult or even impossible to Selecting the best method for collecting the data these work- estimate due to poor visibility, the presence of
-
 )
March 2024 - Marine Technology Reporter page: 16
)
March 2024 - Marine Technology Reporter page: 16TECH FEATURE IMR Image courtesy FORCE Technology OPTIMIZING CATHODIC PROTECTION SURVEY USING NON-CONTACT SENSORS By Svenn Magen Wigen, FORCE Technology he principle behind sacri? cial anodes, which are water structures, reducing the need for frequent repairs and used to safeguard underwater pipelines
-
 )
March 2024 - Marine Technology Reporter page: 15
)
March 2024 - Marine Technology Reporter page: 15sensor options for longer mission periods. About the Author For glider users working in ? sheries and conservation, Shea Quinn is the Product Line Manager the Sentinel can run several high-energy passive and active of the Slocum Glider at Teledyne Webb acoustic sensors, on-board processing, and imaging
-
 )
March 2024 - Marine Technology Reporter page: 13
)
March 2024 - Marine Technology Reporter page: 13nyone familiar with glider hardware options integrated for a broad Glider answers that need,” said Shea autonomous underwater ve- range of missions. Quinn, Slocum Glider Product Line hicles (AUVs) is certainly “As the use of Slocum Gliders grew, Manager at TWR. A familiar with the popular- so did
-
 )
March 2024 - Marine Technology Reporter page: 11
)
March 2024 - Marine Technology Reporter page: 11assist in identifying mines and act as a neutralization device. About the Author Bottom mines pose even greater chal- David R. Strachan is a defense analyst and founder of lenges. Unlike contact mines, bottom Strikepod Systems, a research and strategic advisory mines utilize a range of sensors to
-
 )
March 2024 - Marine Technology Reporter page: 9
)
March 2024 - Marine Technology Reporter page: 9from marinas along the western coast. The exact number of lizing laser detection systems can detect mines just below the mines, as well as their locations, remains largely a mystery, surface, even those hiding in murky water. The Airborne Laser although reports suggest that over three hundred have been
-
 )
March 2024 - Marine Technology Reporter page: 4
)
March 2024 - Marine Technology Reporter page: 4Editorial NIWA-Nippon Foundation TESMaP/ Rebekah Parsons-King www.marinetechnologynews.com ast month marked the resounding NEW YORK 118 E. 25th St., New York, NY 10010 return of Oceanology Interna- Tel: (212) 477-6700; Fax: (212) 254-6271 tional in London, perennially one Lof the world’s most important