
Page 10: of Offshore Engineer Magazine (Mar/Apr 2021)
Offshore Wind Outlook
Read this page in Pdf, Flash or Html5 edition of Mar/Apr 2021 Offshore Engineer Magazine
 9
9
 11
11
LEADING OFF SIMULATION into particular nodes of the ML or by making the ML model ule can use these changes to upgrade and segment the rules learn aspects of the physics-based system and apply that learn- in the ML model. This process continues until a satisfactory ing directly. This approach effectively provides data-driven output is obtained. The Neural Network Builder in SIM tool decisions to the entire system of systems. creates neural networks from simulation models or external data sets. Neural networks provide a functional and compact
DATA DRIVEN ML CONTROL FOR DP representation of input-output relationships which mimics
Dynamic Positioning (DP) can be one example where the the complex behavior of the underlying model. Creation of a operation of vessel systems can beneft from ML algorithms. neural network is executed in 3 main steps as shown in fg 6:
Ships that are involved in safety-critical operations related 1. I mport of simulation results from a physics model to drilling, cargo-transfer, subsea crane operations and pipe- 2. U se results from sim model for training of laying typically have an extended actuator setup to allow for multi-layer networks redundancy in case of system errors. During such operations, 3. V alidation of trained networks with fdelity the vessel is required to control its position and heading. DP metrics and plots of ships is a control mode that seeks to maintain a specifc Once trained, the network can be exported as a submodel position (station keeping) or perform low-speed maneuvers. or as an ONNX fle.
A data driven control ML approach can be applied to re- The Marine and Offshore industries are adopting state of solve the problem of DP in an over-actuated ship subject to the art ML concepts to improve vessel effciency and per- environmental forces. This control approach improved the formance. This paper describes the combination of ML and overall ships performance criteria leaving the human decision physics-based simulation as a hybrid approach fostering intel- to the top of the hierarchical DP control structure. ligent analysis of applications that can beneft from a com-
A hybrid modelling theme as discussed in this paper, that com- bination of data-driven and knowledge-based approaches. bines the ML data model with the prior knowledge physics-based Choosing the right ML algorithm to accommodate the com- model can help fnd solutions and improve the performance. plexities of a real system is challenging. A high volume of real-world data and testing is usually required in choosing the
SIM TOOL TO TRAIN AND TEST ML ML, but the data may not always be available. In this paper
Physics based SIM models can help, to train and test the ABS describes how SIM tools can be used in solving the prob-
ML algorithms by: lem of real-world data hunt by connecting prior knowledge 1. S imulating near real world data physics-based models with an ML model. We explain how 2. T esting different ML algorithms these sim tools can be used to train the ML, test the ML, and 3. T esting the quality of the data sources make corrections and retest the ML algorithm under a range
This approach provides full control over the data provided of scenarios at a scale not practicable with physical testing. A to the ML, both parameters contained within the data and hybrid model workfow connecting physics-based model to the volume and frequency of the data. The SIM tool neural train the multi-layer neural network (one of the most known network module as shown in fg 5 & fg 6, can help to train ML algorithms) is shown as an example. ABS as a Class So- and test the ML algorithm. If output of the ML is not accept- ciety believes simulation will play an important role as the able changes can be made to the algorithm and the ML mod- industry adopts ML.
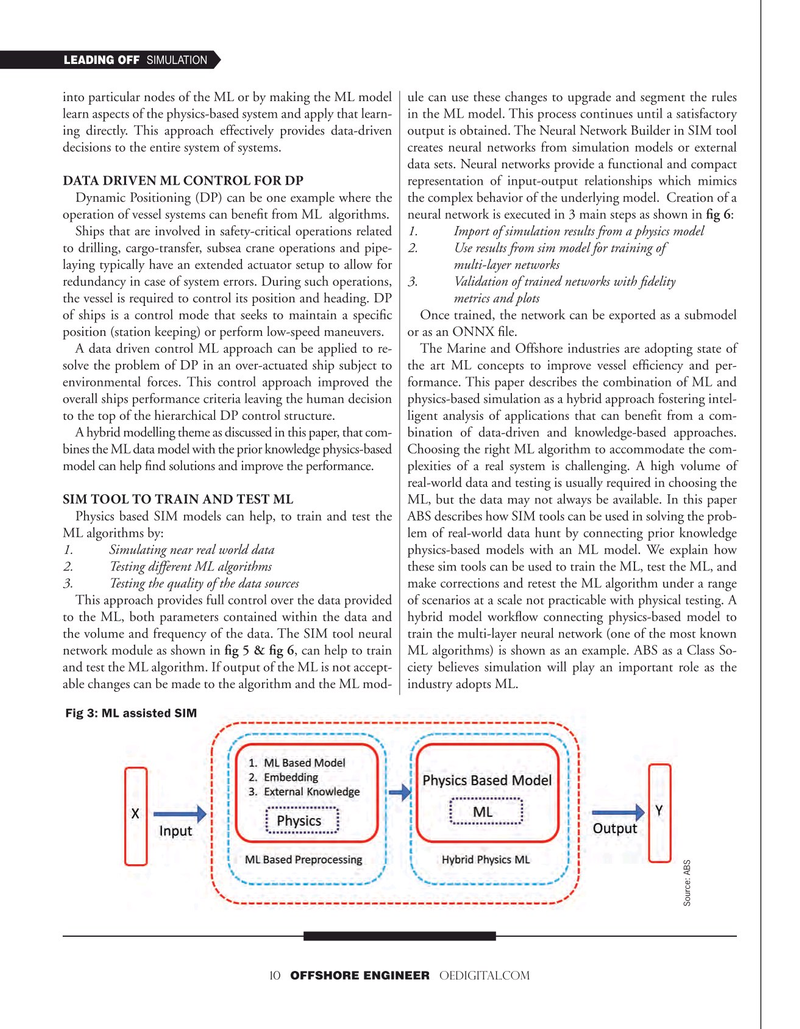
Fig 3: ML assisted SIM
Source: ABS 10 OFFSHORE ENGINEER OEDIGITAL.COM