
Page 30: of Marine Technology Magazine (Apr/May 2005)
Read this page in Pdf, Flash or Html5 edition of Apr/May 2005 Marine Technology Magazine
 29
29
 31
31
plexity, in deeper water and of increased criticality to suc- cessful operations. Installation, support & maintenance of this equipment is currently carried out using specialized vessel based Remotely Operated Vehicle's (ROV's) and/or diving operations. The vision of Subsea 7 & SeeByte is to use our know-how in offshore operations and autonomous technology to provide this type of service using a hover-capable inspection AUV operating from a host facility. The ability to operate directly from the host facility as apposed to an infield support vessel provides sig- nificant advantages as routine or unplanned inspections can be easily and frequently carried out without a dedi- cated support vessel.
The introduction of hover-capable AUV's has some striking similarities with the path taken by ROV based tooling systems starting in the early 1980's on projects such as Chevron Montenazo, leading on to the
ISO13628-8 intervention standards and the deep water operations carried out all over the world today. The hover- capable AUV concept now evolving will, like the ROV based systems, provide a unique capability that in time will change the way life of field projects are carried out.
The improvements that free flying AUVs brought to the seabed survey market is a positive indicator to the poten- tial gains that autonomous systems can bring. In little over 10 years AUVs developed for oceanographic and military applications have entered the commercial market and are now the tool of choice for deep water seabed surveys. A recent paper by Thomas S. Chance of C&C Technologies charts this development path [2]. The starting point for
Subsea 7's involvement in AUV technology was a 10-year license agreement with Southampton Oceanographic
Centre (SOC), commencing in 2001, for total access to current Autosub technology. Subsea 7 engineers used the
Autosub template to develop a significantly modified vehicle designed and implemented to operate in the demanding oil, gas and subsea cable markets with the specification of minimum 30 hour missions in water depths to 3000m.
From the initial development phase the Subsea 7 vehi- cle, Geosub, has been used to help develop intelligent pay- load systems such as SeeByte's Autotracker [1]. This pay- load is used to analyse the side-scan and multibeam data in real time to detect and track pipelines. The output from the tracker is fused with the legacy data and it is used to plan an optimal route for the AUV to survey the pipe.
Subsea 7's engineering know-how was also of service to
SeeByte when developing the SpiNav [3] program: a pay- load for AUV riser inspection. Through these programs it became evident that the technology was ready for transi- tion to a hover-capable AUV capable of carrying out inspection and eventually light intervention work.
PAIV
To get from the development environment to a point where a hover-capable AUV will be routinely used in a
Life of Field project, Subsea 7 and SeeByte have jointly developed a structured three-phase plan to de-risk the technologies, develop operating methods and qualify the technology for use. To achieve this a Prototype
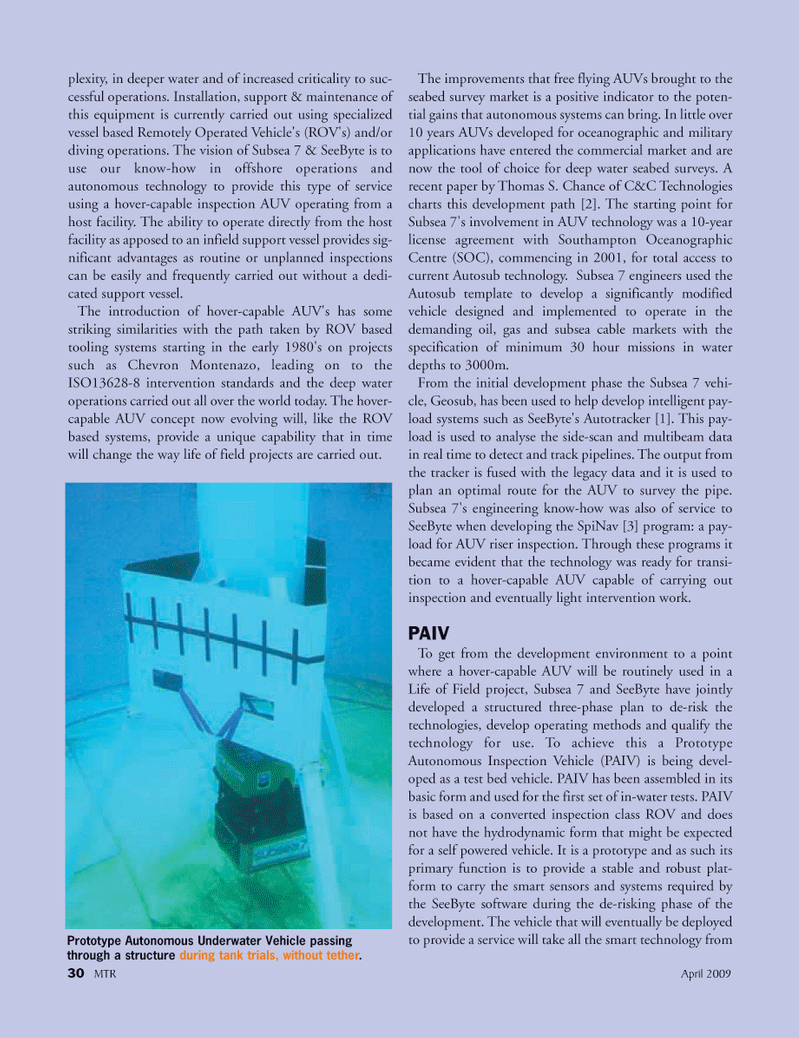
Autonomous Inspection Vehicle (PAIV) is being devel- oped as a test bed vehicle. PAIV has been assembled in its basic form and used for the first set of in-water tests. PAIV is based on a converted inspection class ROV and does not have the hydrodynamic form that might be expected for a self powered vehicle. It is a prototype and as such its primary function is to provide a stable and robust plat- form to carry the smart sensors and systems required by the SeeByte software during the de-risking phase of the development. The vehicle that will eventually be deployed to provide a service will take all the smart technology from 30 MTR April 2009
Prototype Autonomous Underwater Vehicle passing through a structure during tank trials, without tether.
MTR#3 (18-33).qxd 3/27/2009 2:09 PM Page 30