
Page 23: of Marine Technology Magazine (Jul/Aug 2005)
Read this page in Pdf, Flash or Html5 edition of Jul/Aug 2005 Marine Technology Magazine
 22
22
 24
24
24 MTR July/August 2005 on station for a week or more.
Vehicles of this class will weigh up to ten tons and can be launched from submarines, including the Navy's
SSGN. These vehicles have the great- est power requirements, so the navy is investigating a variety of new propul- sion technologies. These large sys- tems are used for persistent ISR,
ASW "hold-at-risk" missions; long- range oceanography and various pay- load delivery missions.
By allowing systems to be in more places at the same time, UUVs become a force multiplier. They are uniquely capable to operate in the undersea environment for extended periods. They offer the utility of placing or removing objects or sen- sors; conducting bottom surveys; gathering, transmitting or relaying information as well as performing reconnaissance of the underwater battlespace. The Navy seeks the attributes that UUVs can provide, because they can operate in difficult environments while removing the human element from high-risk situa- tions.
The Navy already uses a variety of
UUVs for mine-countermeasures.
The Littoral Combat Ship will rely heavily on UUVs and other unmanned systems for its focused missions of anti-surface warfare, anti- submarine warfare and mine warfare.
UUVs will play an increasingly important role in finding and destroying targets on the bottom, in the water column and on the surface.
They can serve in critical oceano- graphic roles by collecting bathymet- ric data; acoustic information; bot- tom profiles; current, temperature and salinity data; and conducting chemical/biological/nuclear detec- tion.
The master plan calls for setting standards for common systems, inter- faces, and mission planning, operat- ing and control systems. New sys- tems must be "open" and compatible with others. Common systems, such as control, sensors, or batteries, are desired and mission systems will be modular so a UUV can be configured to conduct a variety of different mis-
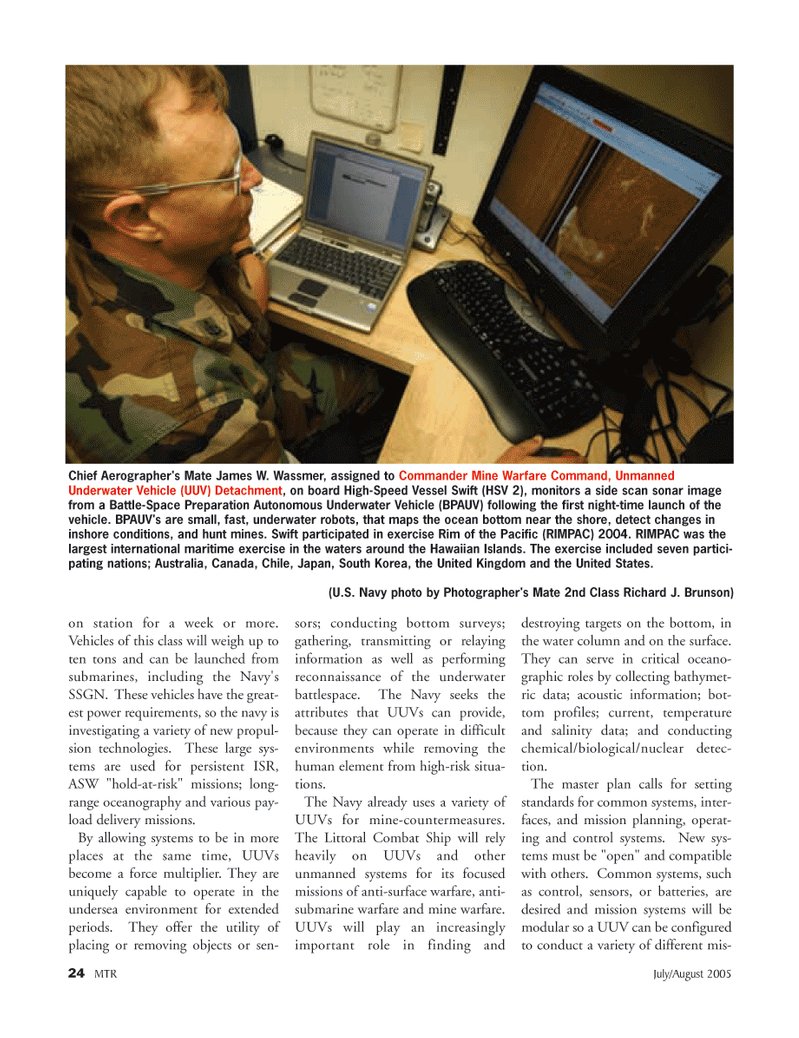
Chief Aerographer's Mate James W. Wassmer, assigned to Commander Mine Warfare Command, Unmanned
Underwater Vehicle (UUV) Detachment, on board High-Speed Vessel Swift (HSV 2), monitors a side scan sonar image from a Battle-Space Preparation Autonomous Underwater Vehicle (BPAUV) following the first night-time launch of the vehicle. BPAUV's are small, fast, underwater robots, that maps the ocean bottom near the shore, detect changes in inshore conditions, and hunt mines. Swift participated in exercise Rim of the Pacific (RIMPAC) 2004. RIMPAC was the largest international maritime exercise in the waters around the Hawaiian Islands. The exercise included seven partici- pating nations; Australia, Canada, Chile, Japan, South Korea, the United Kingdom and the United States. (U.S. Navy photo by Photographer's Mate 2nd Class Richard J. Brunson)
MTR#1 (17-32).qxd 7/19/2005 9:56 AM Page 24