
Page 36: of Marine Technology Magazine (Nov/Dec 2010)
Fresh Water Monitoring and Sensors(lakes, rivers, reservoirs)
Read this page in Pdf, Flash or Html5 edition of Nov/Dec 2010 Marine Technology Magazine
 35
35
 37
37
from military to scientific to commercial communities,
Frost projects continual improvement in this area. “We’re making breakthroughs all of the time, and there is a push for more efficient batteries across nearly every industry, particularly the automotive industry,” he said. “There is a lot of money and pressure toward making better batteries.
In my business, we take the best that is out in the field (lithium primary, non-rechargeable for its glider; rechargeable lithium for the Ranger AUV) and continual- ly strive to extend the mission time and capability.”
As mission length increases, additional challenges emerge as well, such as dealing efficiently with the matter of biofouling. “With all long endurance UUVs, biofoul- ing can be an issue, and with Seaglider’s we’re out for up to 10 months at a time,” Frost said. A top consideration in this regard is the depth at which the vehicle operates. In shallower water, fouling is much quicker and more aggres- sive, whereas the glider’s ability to dive to 1000m helps mitigate the problem to an extent, as at this depth “it causes a number of things to shake loose.”
Looking at Robotics as a whole, Frost counts advances in processor speed as the leading technological factor driv- ing robotics forward during his career. “We are riding a delightful curve on processor speed, with a doubling of power every two years that allows us to do much more with the robots,” he said. Similarly, tremendous strides in sensor capacity and performance, advances in laser-based scanners (smaller, more durable, more accurate) and cam- eras as contributing factors. “Another big factor, though not a technology, is simply acceptance,” Frost said. “If you look at the way robots have been deployed in the last 10 years, there is a much greater acceptance of them in warfare and commercial applications.”
In the Field iRobot systems are designed for a variety of missions: military, commercial and scientific, and the company has a number of significant success stories on its log. Most recently, it played a pivotal role in the collection and dis- semination of information following the massive oil out- flow in the Gulf of Mexico. iRobot’s Seaglider Unmanned Underwater Vehicle (UUV) was used as a platform to collect ocean data in an effort to monitor the recent Gulf of Mexico oil spill. iRobot worked with Dr. Vernon Asper of the Marine
Science Department at the University of Southern
Mississippi (www.usm.edu) and Dr. Craig Lee from the
University of Washington’s Applied Physics Laboratory.
In this role, Seaglider measured temperature, salinity and other ocean properties in 3D at depths of up to 1000m (3,290 ft.), allowing researchers to collect data at depths not easily achieved using traditional surface plat- forms or other UUVs, and to potentially detect the pres- ence of oil and its movement in affected areas. Researchers in the Gulf of Mexico deployed Seaglider to locate and monitor large clouds of dispersed oil droplets believed to be at depths of approximately 700 meters (2,296 feet). 36 MTR November/December 2010
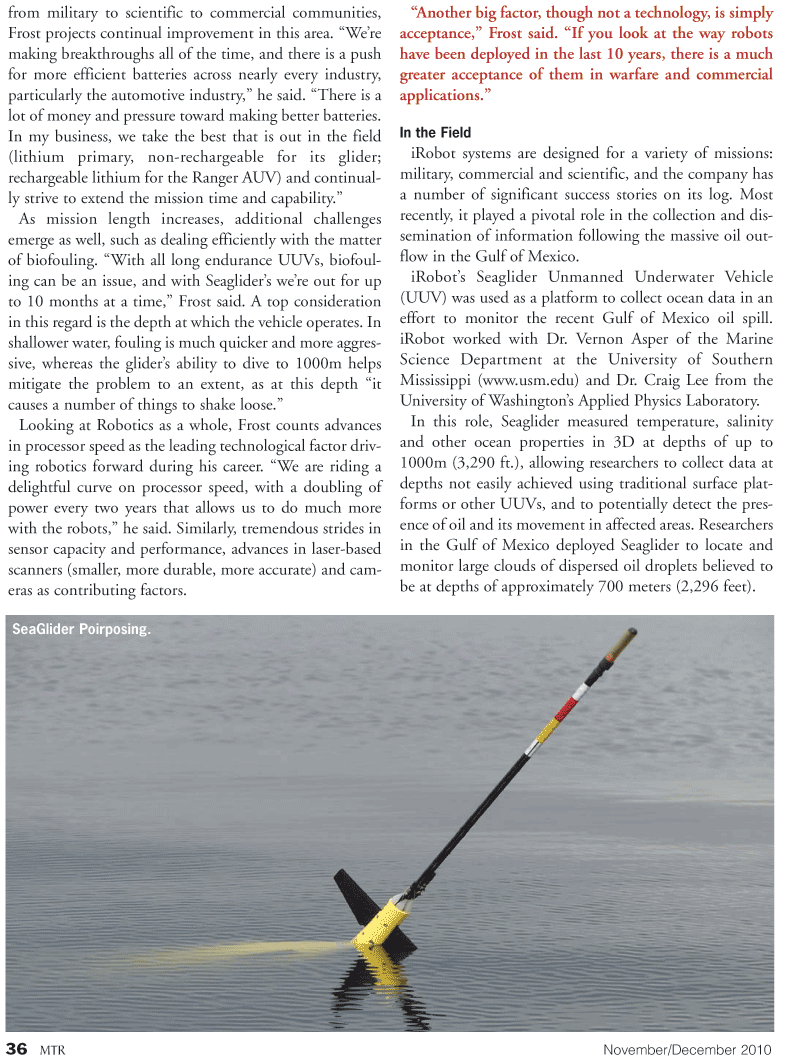
SeaGlider Poirposing.