
Page 14: of Marine Technology Magazine (Apr/May 2011)
Oil & Gas SubSea Monitoring
Read this page in Pdf, Flash or Html5 edition of Apr/May 2011 Marine Technology Magazine
 13
13
 15
15
14 MTR April 2011
ABS Releases Guide for Offshore Wind
Turbine Installations
ABS released a Guide for Building and
Classing Offshore Wind
Turbine Installations, the first Guide to address design consid- erations for the bot- tom founded support structure of an off- shore wind turbine situ- ated in tropical storm prone areas on the
U.S. Outer Continental
Shelf (OCS) such as the Gulf of Mexico and
East Coast.
Guides developed to date have been prima- rily based on experi- ence from European coastal waters.
However, ABS’ Guide is the first to specifi- cally consider the con- ditions these struc- tures may encounter in tropical storm prone waters. The Guide takes into account the
IEC 61400 series of standards for wind tur- bines, the American
Petroleum Institute’s
Recommended
Practice for Planning,
Designing and
Constructing Fixed
Offshore Platforms (API RP 2A), ABS’ off- shore Rules and
Guides and the unique environmental condi- tions on the US OCS.
Hosted by the research ship the RRS
Discovery, the latest in the Autosub series of autonomous underwater vehicles (AUVs),
Autosub Long Range, has reportedly com- pleted its first set of sea trials in a location in the deep Atlantic Ocean, 300 miles south- west of the Canary Islands. Autosub Long
Range is a new type of AUV developed at the
National Oceanography Center (NOC) in
Southampton, UK. By traveling rather slow- ly (0.4 metres per second), and keeping a tight rein on the power available to its sen- sors, it will be capable of missions of up to six months duration and ranges of 6,000 km. It can dive to a depth of 6,000 m. The vehicle will also have the capability of powering down and hibernating while anchored to the seafloor, waking up periodically or when it senses an interesting event. This opens up many interesting science mission opportuni- ties, from, for example, long transects across the ocean basins to very detailed and long- term monitoring of a small area.
The sea trials on Discovery in January were the first time that the AUV has been operat- ed in water. The objectives of the trials were to confirm that the AUV could dive from the surface, control its heading and pitch accu- rately, and surface (giving good exposure to its radio antenna which are used for commu- nications with operators anywhere in the world through an Iridium satellite modem).
Autosub AUV Completes Sea Trials news
Autosub lowered into the water for its first deployment. Note the sea catcher release system, and the line on the tail, used to control the AUVs heading during launch (this is snapped off with a sharp tug).
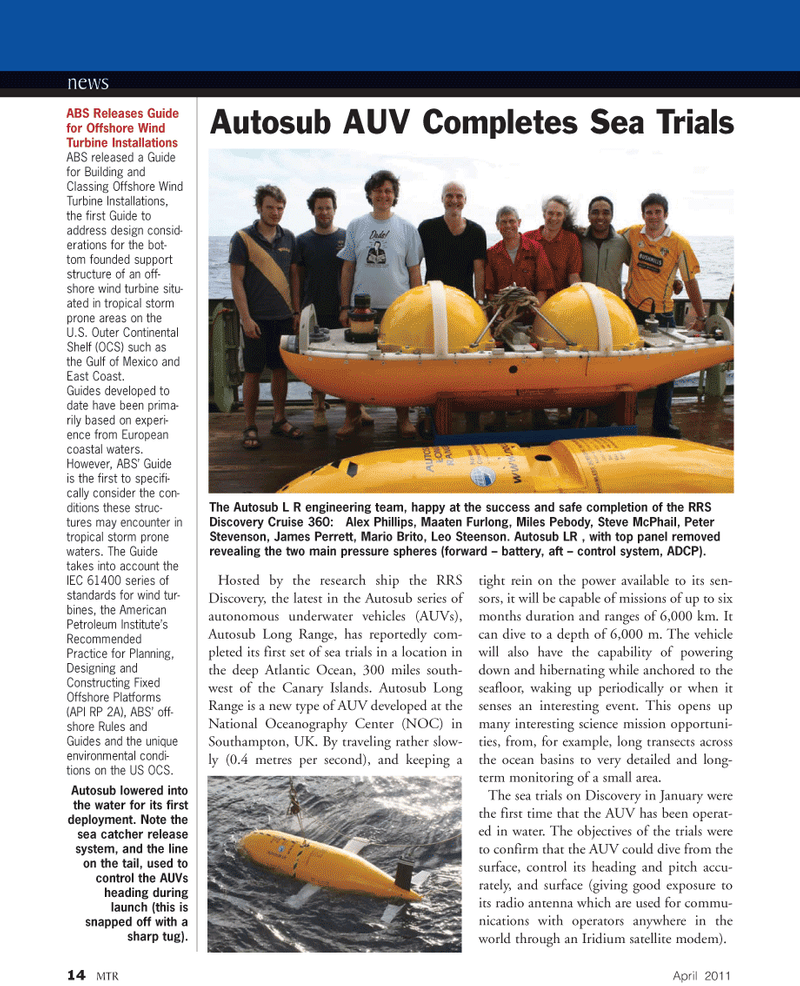
The Autosub L R engineering team, happy at the success and safe completion of the RRS
Discovery Cruise 360: Alex Phillips, Maaten Furlong, Miles Pebody, Steve McPhail, Peter
Stevenson, James Perrett, Mario Brito, Leo Steenson. Autosub LR , with top panel removed revealing the two main pressure spheres (forward – battery, aft – control system, ADCP).