
Page 28: of Marine Technology Magazine (Sep/Oct 2013)
Ocean Observation: Gliders, Buoys & Sub-Surface monitoring Networks
Read this page in Pdf, Flash or Html5 edition of Sep/Oct 2013 Marine Technology Magazine
 27
27
 29
29
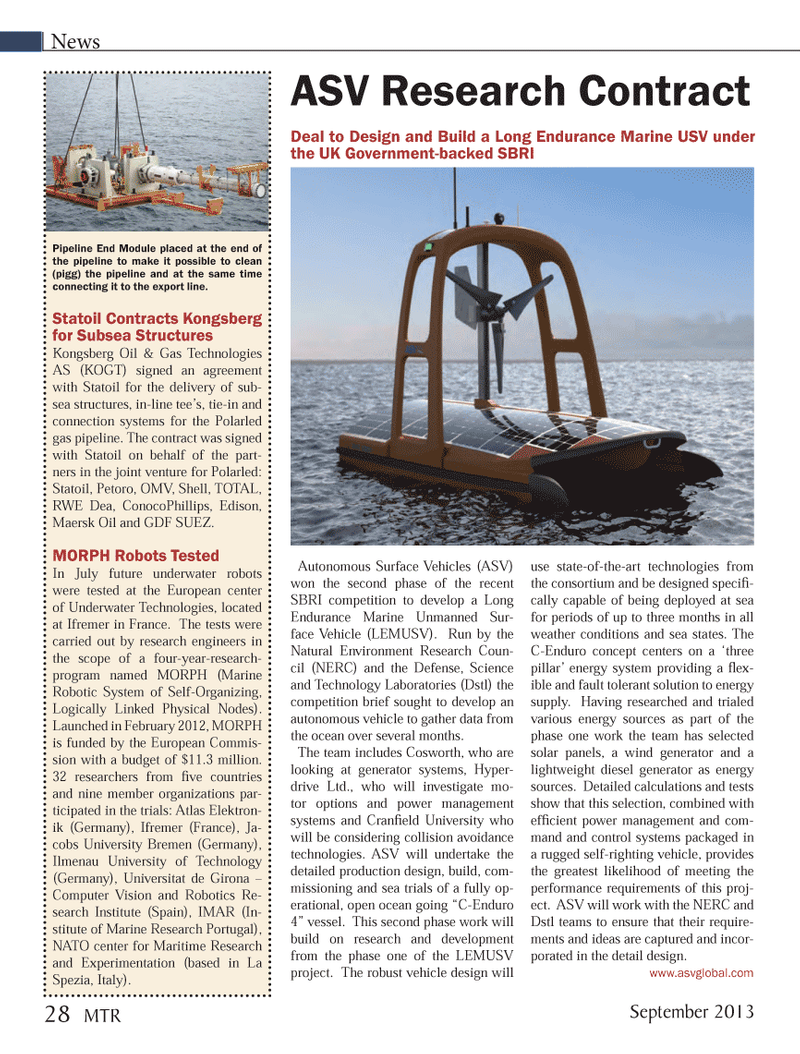
Autonomous Surface Vehicles (ASV) won the second phase of the recent SBRI competition to develop a Long Endurance Marine Unmanned Sur- face Vehicle (LEMUSV). Run by the Natural Environment Research Coun- cil (NERC) and the Defense, Science and Technology Laboratories (Dstl) the competition brief sought to develop an autonomous vehicle to gather data from the ocean over several months. The team includes Cosworth, who are looking at generator systems, Hyper- drive Ltd., who will investigate mo- tor options and power management systems and CranÞ eld University who will be considering collision avoidance technologies. ASV will undertake the detailed production design, build, com- missioning and sea trials of a fully op-erational, open ocean going ÒC-Enduro 4Ó vessel. This second phase work will build on research and development from the phase one of the LEMUSV project. The robust vehicle design will use state-of-the-art technologies from the consortium and be designed speciÞ -cally capable of being deployed at sea for periods of up to three months in all weather conditions and sea states. The C-Enduro concept centers on a Ôthree pillarÕ energy system providing a ß ex- ible and fault tolerant solution to energy supply. Having researched and trialed various energy sources as part of the phase one work the team has selected solar panels, a wind generator and a lightweight diesel generator as energy sources. Detailed calculations and tests show that this selection, combined with efÞ cient power management and com- mand and control systems packaged in a rugged self-righting vehicle, provides the greatest likelihood of meeting the performance requirements of this proj-ect. ASV will work with the NERC and Dstl teams to ensure that their require-ments and ideas are captured and incor- porated in the detail design.www.asvglobal.com News Pipeline End Module placed at the end of the pipeline to make it possible to clean (pigg) the pipeline and at the same time connecting it to the export line. Statoil Contracts Kongsberg for Subsea Structures Kongsberg Oil & Gas Technologies AS (KOGT) signed an agreement with Statoil for the delivery of sub- sea structures, in-line teeÕs, tie-in and connection systems for the Polarled gas pipeline. The contract was signed with Statoil on behalf of the part-ners in the joint venture for Polarled: Statoil, Petoro, OMV, Shell, TOTAL, RWE Dea, ConocoPhillips, Edison, Maersk Oil and GDF SUEZ.MORPH Robots Tested In July future underwater robots were tested at the European center of Underwater Technologies, located at Ifremer in France. The tests were carried out by research engineers in the scope of a four-year-research- program named MORPH (Marine Robotic System of Self-Organizing, Logically Linked Physical Nodes). Launched in February 2012, MORPH is funded by the European Commis-sion with a budget of $11.3 million. 32 researchers from Þ ve countries and nine member organizations par- ticipated in the trials: Atlas Elektron- ik (Germany), Ifremer (France), Ja- cobs University Bremen (Germany), Ilmenau University of Technology (Germany), Universitat de Girona Ð Computer Vision and Robotics Re- search Institute (Spain), IMAR (In-stitute of Marine Research Portugal), NATO center for Maritime Research and Experimentation (based in La Spezia, Italy).ASV Research Contract Deal to Design and Build a Long Endurance Marine USV under the UK Government-backed SBRI 28 MTRSeptember 2013MTR #7 (18-33).indd 28MTR #7 (18-33).indd 288/22/2013 10:31:48 AM8/22/2013 10:31:48 AM