
Page 28: of Marine Technology Magazine (Jan/Feb 2020)
Read this page in Pdf, Flash or Html5 edition of Jan/Feb 2020 Marine Technology Magazine
 27
27
 29
29
Subsea Vehicles
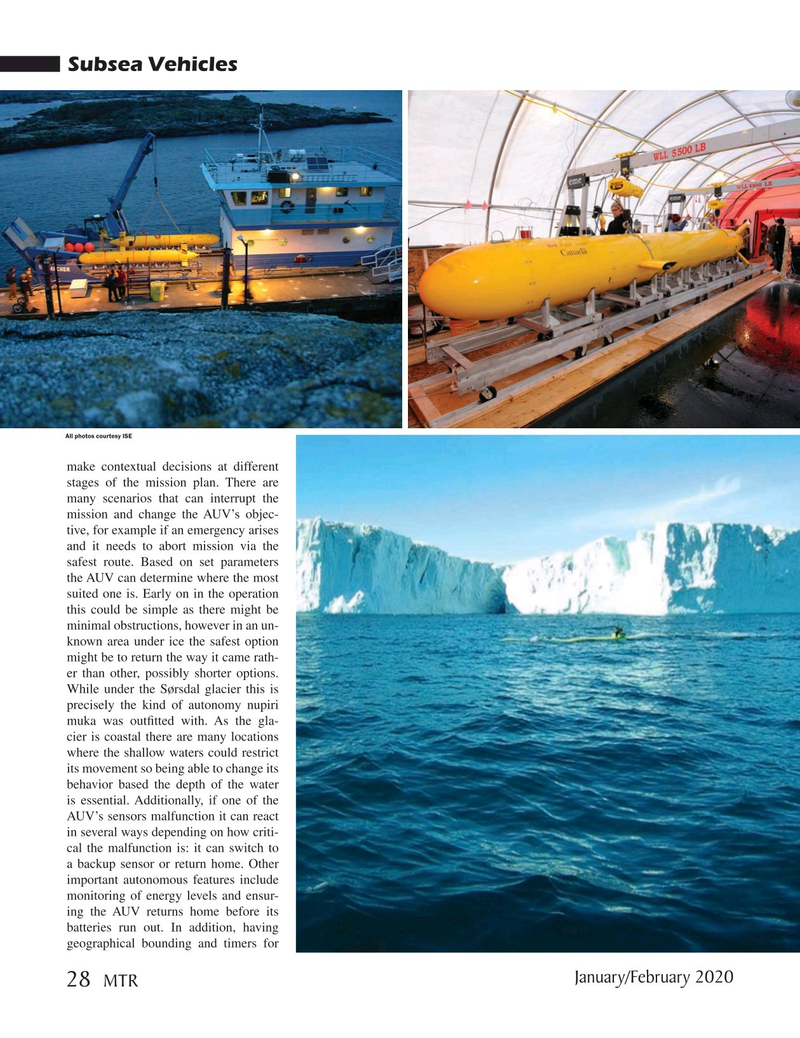
All photos courtesy ISE make contextual decisions at different stages of the mission plan. There are many scenarios that can interrupt the mission and change the AUV’s objec- tive, for example if an emergency arises and it needs to abort mission via the safest route. Based on set parameters the AUV can determine where the most suited one is. Early on in the operation this could be simple as there might be minimal obstructions, however in an un- known area under ice the safest option might be to return the way it came rath- er than other, possibly shorter options.
While under the Sørsdal glacier this is precisely the kind of autonomy nupiri muka was out? tted with. As the gla- cier is coastal there are many locations where the shallow waters could restrict its movement so being able to change its behavior based the depth of the water is essential. Additionally, if one of the
AUV’s sensors malfunction it can react in several ways depending on how criti- cal the malfunction is: it can switch to a backup sensor or return home. Other important autonomous features include monitoring of energy levels and ensur- ing the AUV returns home before its batteries run out. In addition, having geographical bounding and timers for
January/February 2020 28 MTR
MTR #1 (18-33).indd 28 1/16/2020 11:27:49 AM