
Page 21: of Marine Technology Magazine (Mar/Apr 2022)
Read this page in Pdf, Flash or Html5 edition of Mar/Apr 2022 Marine Technology Magazine
 20
20
 22
22
CASE STUDY SMALL AUTONOMOUS LANDERS
FOR STUDYING THE COMMUNITY ECOLOGY OF
NEARSHORE SUBMARINE CANYONS
By Ashley M. Nicoll, PhD candidate, Stony Brook University &
Kevin Hardy, Global Ocean Design LLC, MTR Columnist ander Lab will routinely feature ? eld work by research- ecology, we adapted two autonomous lander systems: a Global ers from around the world using ocean landers. We be- Ocean Design LLC 2-sphere Picolander for exploratory deploy- gin with the 2021 Scripps Institution of Oceanography/ ments (< 3 days) and a Global Ocean Design LLC 3-sphere
LUCSD work of Ashley Nicoll, currently a PhD student at Nanolander for longer deployments (> 1 week). Both landers
Stony Brook University, Stony Brook, Long Island, New York. were out? tted with a novel self-recording digital camera and
Ashley’s full Master’s Thesis paper, “Nicoll Thesis 2021.pdf”, LED lights system plus a Zebra-Tech environmental sensor to may be found at
Nearshore submarine canyons are unique features that bring days at depths of 90-500 m, allowing assessment of how sea- the deep sea close to shore, potentially functioning as highways ? oor community diversity and composition changed with depth connecting shallow and deep-sea ecosystems. To study their and time of day.
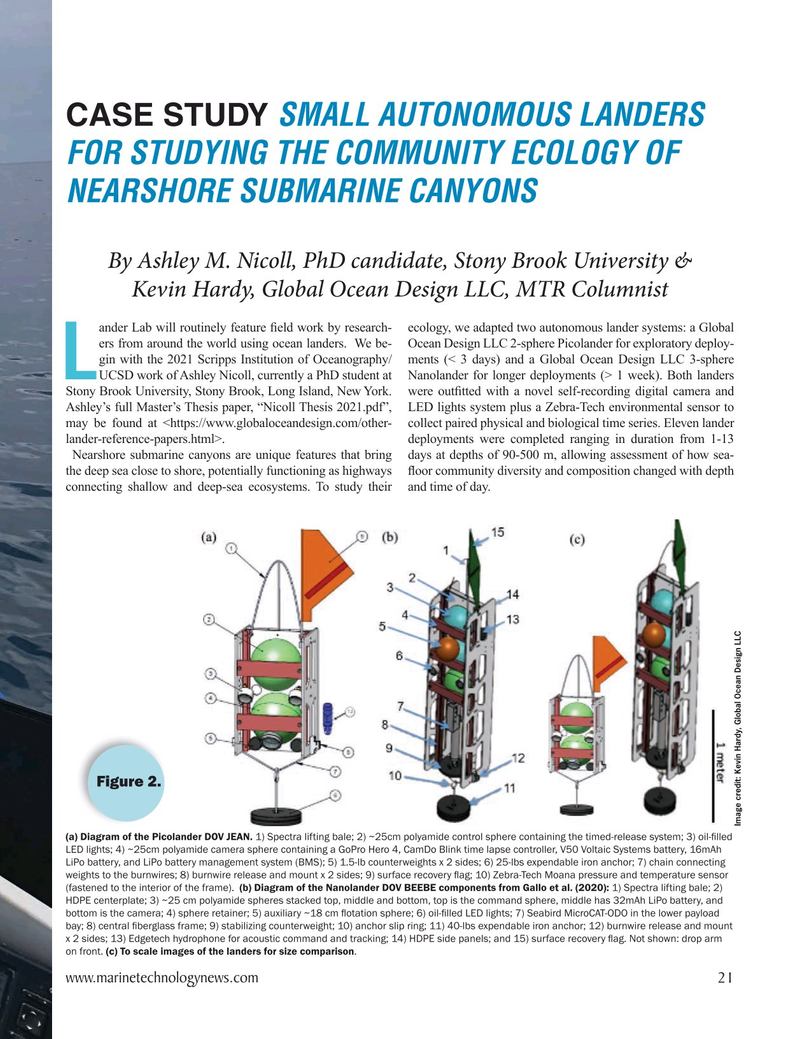
Figure 2.
Image credit: Kevin Hardy, Global Ocean Design LLC (a) Diagram of the Picolander DOV JEAN. 1) Spectra lifting bale; 2) ~25cm polyamide control sphere containing the timed-release system; 3) oil-? lled
LED lights; 4) ~25cm polyamide camera sphere containing a GoPro Hero 4, CamDo Blink time lapse controller, V50 Voltaic Systems battery, 16mAh
LiPo battery, and LiPo battery management system (BMS); 5) 1.5-lb counterweights x 2 sides; 6) 25-lbs expendable iron anchor; 7) chain connecting weights to the burnwires; 8) burnwire release and mount x 2 sides; 9) surface recovery ? ag; 10) Zebra-Tech Moana pressure and temperature sensor (fastened to the interior of the frame). (b) Diagram of the Nanolander DOV BEEBE components from Gallo et al. (2020): 1) Spectra lifting bale; 2)
HDPE centerplate; 3) ~25 cm polyamide spheres stacked top, middle and bottom, top is the command sphere, middle has 32mAh LiPo battery, and bottom is the camera; 4) sphere retainer; 5) auxiliary ~18 cm ? otation sphere; 6) oil-? lled LED lights; 7) Seabird MicroCAT-ODO in the lower payload bay; 8) central ? berglass frame; 9) stabilizing counterweight; 10) anchor slip ring; 11) 40-lbs expendable iron anchor; 12) burnwire release and mount x 2 sides; 13) Edgetech hydrophone for acoustic command and tracking; 14) HDPE side panels; and 15) surface recovery ? ag. Not shown: drop arm on front. (c) To scale images of the landers for size comparison. www.marinetechnologynews.com 21
MTR #3 (18-33).indd 21 2/25/2022 9:23:10 AM