Page 51: of Maritime Reporter Magazine (April 2021)
Offshore Wind Energy: Installation, Crew & Supply Vessels
Read this page in Pdf, Flash or Html5 edition of April 2021 Maritime Reporter Magazine
 50
50
 52
52
TECH FILES DIGITALIZATION vature of the Earth limits the maximum tion of target of which minimum pro- using the new set-up, the boat was still range of human vision, for example. jected dimension extends more than 2 detectable at 6.8 km.
If this observation appears to be of arcminutes in the ? eld of view at the vis- In sum, Table 1 shows the camera- hair-splitting proportions, it should be ibility range in decreased visibility con- based detection distances for various noted that a lookout with ‘perfect’ vi- ditions; [3] Detection of a target in front marine-relevant targets and compares sion positioned at a height of 30 meters of the horizon that extends 2 arcminutes them to the estimated detection dis- would not be able to see another 30-me- in the minimum projected dimension in tances of a human lookout. It offers a ter high structure at all if it were 39.1 good visibility conditions detailed account of the way the camera km away. However, the vision of a real If the above can be demonstrated, the setup can achieve the equal or better lookout would not be perfect: based on minimum level of a lookout – that is, performance than the human eye in vis- the minimum eyesight requirement for detecting the targets – could be shown ibility conditions that are given as good. deck of? cers, the minimum angular to be ‘as good or better’ than the human. Modern perception technologies also resolution of a human lookout is 2 ‘ar- achieve performance beyond human cminute’. The same 30-meter high ob- Trials and learnings perception capabilities for other reasons. server would actually only see a struc- In order to verify theoretical asser- For example, infrared (IR) camera tech- ture of the same height at a distance of tions, a camera-operated awareness sys- nology can detect targets in decreased 31.7 km. In real conditions, the lookout’s tem was tested around Helsinki archi- visibility conditions that a human with visibility is also in? uenced by fog, haze, pelago, using a set up that worked with binoculars cannot. rain, smoke, etc. The range of visibility a full HD PTZ-camera and 30x optical Short wave infrared (SWIR) cameras will therefore depend not only on light zoom. The horizontal ? eld-of-view of enable detecting other vessels even conditions, but on the properties of the the camera with maximum zoom set- through fog and long wave infrared target. For some, these limitations and tings is 2.3°, with the camera installed at (LWIR) cameras enable detecting other areas of uncertainty are simply part and a height of 10 meters. The vessel where vessels, debris and ? oating obstacles parcel of the real world. Furthermore, the camera was mounted was stationary even in pitch black conditions.
camera performance is also affected by during the experiment. It is important to acknowledge that the real world - by air quality, humidity, Two pleasure crafts described were these high-end technologies come with vapor, light conditions, contrast, color used as detected targets. The boats were costs attached, meaning that any claim and the re? ectivity of the object. Again, navigated to a speci? c distance from the to be ‘better than a human’ should be lens quality and focus can vary, while vessel where the camera was mounted. weighed up from the ? nancial as well mechanical vibration may also compro- The weather was clear, with 4 m/s wind as the practical standpoint. In doing so, mise performance. from north east. The air pressure was however, it is worth considering that 1019 hPA and visibility was good. The automated advantages are cumulative:
Digital and connected real world time of day during the experiment was the human lookout needs to process, re-
However, in the real world where 04:00 am to 06:00 am. Using the con- member and track targets detected visu- ships operate today, the SOLAS navi- ventional approach, it would be expect- ally and reconcile this information with gational aid equipment with which hu- ed that the ‘Small pleasure craft’ would that coming from the AIS and ARPA mans interact is already digital. Looked be detected at around 5.8 km. However, radar. at from the functional, rather than hu- man perspective, the lookout performs
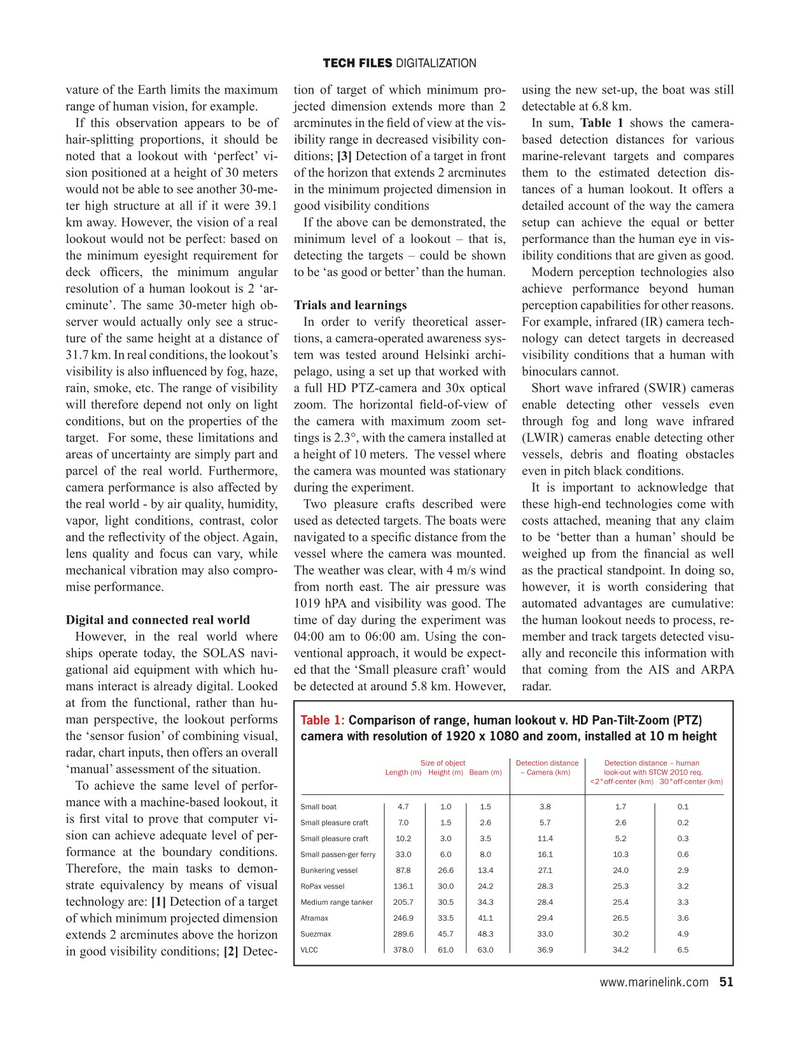
Table 1: Comparison of range, human lookout v. HD Pan-Tilt-Zoom (PTZ) the ‘sensor fusion’ of combining visual, camera with resolution of 1920 x 1080 and zoom, installed at 10 m height radar, chart inputs, then offers an overall Size of object Detection distance Detection distance – human ‘manual’ assessment of the situation. Length (m) Height (m) Beam (m) – Camera (km) look-out with STCW 2010 req.
<2°off-center (km) 30°off-center (km)
To achieve the same level of perfor- mance with a machine-based lookout, it
Small boat 4.7 1.0 1.5 3.8 1.7 0.1 is ? rst vital to prove that computer vi-
Small pleasure craft 7.0 1.5 2.6 5.7 2.6 0.2 sion can achieve adequate level of per-
Small pleasure craft 10.2 3.0 3.5 11.4 5.2 0.3 formance at the boundary conditions.
Small passen-ger ferry 33.0 6.0 8.0 16.1 10.3 0.6
Therefore, the main tasks to demon-
Bunkering vessel 87.8 26.6 13.4 27.1 24.0 2.9
RoPax vessel 136.1 30.0 24.2 28.3 25.3 3.2 strate equivalency by means of visual
Medium range tanker 205.7 30.5 34.3 28.4 25.4 3.3 technology are: [1] Detection of a target
Aframax 246.9 33.5 41.1 29.4 26.5 3.6 of which minimum projected dimension
Suezmax 289.6 45.7 48.3 33.0 30.2 4.9 extends 2 arcminutes above the horizon
VLCC 378.0 61.0 63.0 36.9 34.2 6.5 in good visibility conditions; [2] Detec- www.marinelink.com 51
MR #4 (50-59).indd 51 4/5/2021 2:36:29 PM