
Page 25: of Marine Technology Magazine (May/Jun 2008)
Undersea Defense Edition
Read this page in Pdf, Flash or Html5 edition of May/Jun 2008 Marine Technology Magazine
 24
24
 26
26
www.seadiscovery.com Marine Technology Reporter 25 an ROV-pilot or diver, unfortunately, has had the experi- ence of attempting to navigate through difficult sur- roundings with poor visibility.
In some respects, divers have the advantage of utilizing tactile feedback to feel their way through a project site.
Armed with an understanding of their surroundings prior to a dive, and communications with the surface during a dive, it is possible for divers to overcome poor visibility and use their hands (and feet, and knees, and heads) to navigate around a project site.
ROVs, however, do not afford the luxury of providing tactile feedback to the operators. Even if armed with a manipulator arm, it may not be possible for an ROV to "turn around, face your rig, and take up your slack as you come back" in order to free an entangled umbilical.
Instead, ROV operators rely on operational strategies and a growing suite of technologies to improve or supplement their situational awareness and operate in poor visibility environments.
Low light cameras, improved subsea lighting systems, and visual enhancement technologies serve to improve the visual quality in video feeds available to ROV operators.
Varying grades of high definition, high-resolution scan- ning/imaging sonars are common on ROVs from large work-class machines to small mini-ROVs, providing oper- ators with improved awareness that is not impacted by the quality of visibility. Real-time positioning is often provid- ed by acoustic positioning systems such as ultra-short baseline (USBL) and long-baseline (LBL) systems.
These improved visual and acoustic technologies are excellent options for providing better real-time, nearfield observations. Range limitations prevent them from pro- viding an understanding of "big picture" situational awareness. This may be acceptable when the access and egress pathways are easily located and utilized. Open water projects often afford the opportunity to comple- ment these observation systems with acoustic positioning from USBL and LBL systems which can aid the operators in understanding their immediate surroundings and help them to develop a strong sense of situational awareness.
What do we do when a project demands remoteinspection or intervention, and poor visibility, complicated structur- al layouts, and challenging tasks combine to decimate any sense of situational awareness? How can we go beyond the information provided by visual inputs from cameras or sonar imagery and operate in areas where acoustic posi- tioning is not available, so that we can successfully navi- gate an ROV in a poor-visibility, confined access environ- ment? With a limited of amount of fundamental but
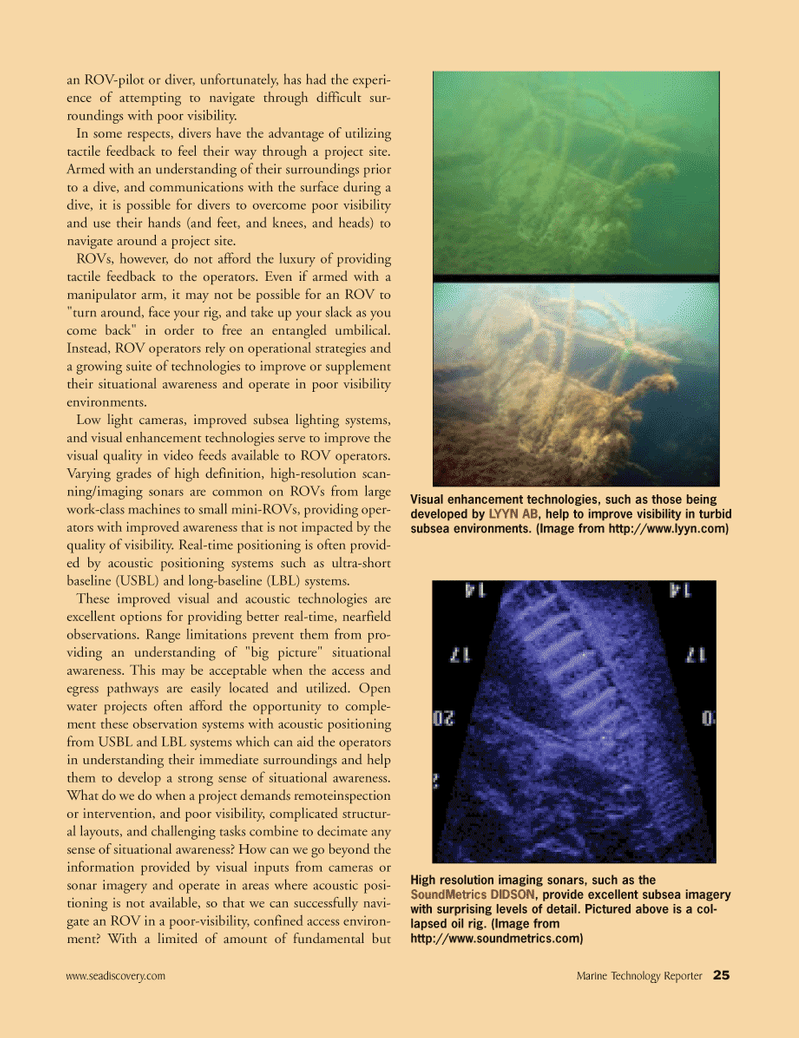
Visual enhancement technologies, such as those being developed by LYYN AB, help to improve visibility in turbid subsea environments. (Image from http://www.lyyn.com)
High resolution imaging sonars, such as the
SoundMetrics DIDSON, provide excellent subsea imagery with surprising levels of detail. Pictured above is a col- lapsed oil rig. (Image from http://www.soundmetrics.com)
MTR#4 (17-32).qxd 5/13/2008 9:59 AM Page 25