
MTR100: When it Comes to Drones, Big is Good. <1m is Better.
Over the last couple of decades, autonomous underwater vehicles (AUV) have become fully established work horses of ocean mapping and surveillance. That doesn’t mean there’s not room for some innovation. Elaine Maslin takes a look at some activity in the sub-1m collaborative drone market.
New breeds of AUV are on their way. Some are bigger, but there’s also a host of companies developing small (<1m), lower-cost AUVs to use in swarms, allowing either faster aerial coverage of the seabed or faster more three-dimensional sampling of bodies of water in shorter periods of time.
It’s been a pipe dream for some time, and some have fallen by the wayside trying to make it happen. Despite having won US Navy contracts to support its SwarmDiver development, Australian firm Aquabotix, quietly went into liquidation in December 2020 having struggled to get funding to continue its work (it had gone down a stock market listing route, leaving it open to more impatient investors).
ecoSUB Robotics
But others are now seeing success. In November last year, UK-based ecoSUB Robotics started selling its micro AUVs to customers and there are now 50-60 out in the wild with various payloads, says Terry Sloane, managing director at parent company Planet Ocean. Customers spread from Africa to Japan include Plymouth Marine Laboratory and Dalhousie University.
The company was set up in 2015 and has had Innovate UK and Defence Science and Technology Laboratory (UK MOD) funding and has collaborated with the Marine Autonomous Robotics Systems Group at the UK’s National Oceanography Centre.
Its now commercial ecoSUBµ5 Micro-AUV is 92cm long, 4 kg in air, rated to 500 m depth, and able to operate for 12-20 hours (depending on battery type) at 1 m/s. The slightly larger ecoSUBm5 Small-AUV is 1m long, weighing 12 kg, rated at 500 m and 1200 m depth, and able to operate for 18-30 hours at 1 m/s.
ecoSUBs work together largely through acoustic positioning, using GPS at the surface and acoustics underwater (with modems developed by the University of Newscastle) in an inverted long baseline array (LBL) type arrangement. Vehicles at the surface (with a GPS signal), broadcast their position to the underwater vehicles, which triangulate their positions relative to the surface position and feeds that information into onboard dead reckoning. ecoSUB has now also added Water Linked Doppler velocity logs (DVLs), to further improve positioning accuracy, making them suitable for operations where greater accuracy is required, such as mine counter measures using side scan sonar, says Sloane.
“We’re able to put 10 ecoSUBS in the water doing a lawn mower survey at five different depths over two, three, four hours and really get a picture of that chunk of water in three dimensions,” he says. “That’s attractive to science, but also oil and gas, when looking at process water or a leak event or oil spill dispersant. They’re also affordable,” noting that “at £10,000 a pop for a Micro-AUV” organizations can affordably put 10 or more in the water.
The company has also been exploring alternative surface nodes, such as USVs. Having already worked with a C-Worker 6 to trial ecoSUB deployment, and with AutoNauts, to act as a surface node, it’s now working on Autonauts carrying multiple ecoSUBs to a specific location or carrying them and deploying them when asked, as well as being a surface node and communications gateway.
The next step is another Innovate UK project, as yet unannounced, which will start bringing artificial intelligence to the vehicles (AI), so that the vehicles can “shoal” independently, says Sloane. “The benefit of a shoal is that, as each vehicle understands how it’s being effected by the environment, as a group they can figure out the best way to approach the mission.”
 Photo courtesy ecoSUB Robotics
Photo courtesy ecoSUB Robotics
EvoLogics
While EvoLogics’ main products are underwater communications and positioning, the company has also been developing its own vehicles and now also navigation software, so that they can work together in swarms, react to changing conditions and communicate with a main control centre. These capabilities are being combined into vehicles like its PingGuin, a penguin shape-vehicle, but will also be able to be used with other vehicles it’s launching, as well as others’ vehicles, says Francisco Bustamante, Sr. Operations Manager, EvoLogics.
“Having more vehicles means you can cover a larger area, but instead of one larger vehicle you can have smaller more compact and perhaps more general vehicles that can be adapted for different missions using these behaviours and being more flexible,” he says, and allowing economies of scale in production.
The core design of the PingGuin is something EvoLogics has been working on for years, following one of the co-founders’ research into penguin locomotion and how efficient the animals at swimming through water. The vehicle is just under 1m long, max 45cm diameter, weighs under 25kg with 3 kg payload, and can travel at up to 5kts. EvoLogics has operated swarms of up to five of them to date and the vehicle is set for an official commercial launch in Q1 next year.
“We have achieved a quite successful tests of swarm operations,” says Bustamante, “multiple vehicles able to communicate amongst themselves and coordinate. Even having a heterogenous combination of vehicles, with a surface vehicle as a command centre and interface between underwater and air, and GPS to georeference activities. This vehicle can be the master of a swarm and they can follow the surface vehicle in formation, as well.”
PingGuin is involved in thyssenkrupp Marine Systems’ Modifiable Underwater Mothership (MUM) project, the MUM2navigate part of which will see the PingGuin accompany the MUM vehicle’s mission as an intelligent swarm, forming an adaptive communications network. The latest phase of this project is to create a docking system to accommodate 5-6 of these vehicles, deploying and recovering them as necessary for recharging and data exchange. The project has €13.2 million funding from the German Federal Ministry for Economic Affairs and Energy.
Another low-drag penguin-shaped vehicle has been developed by EvoLogics as a project with Helmholtz-Zentrum Heroen research institute in Germany. This one, the Quadrion, has been designed to work in swarms to collect data in ocean eddies as part of MOSES (Modular Observation Solutions for Earth System) – a novel observing system. It will carry a payload of fast Sea & Sun sensors to measure temperature, pressure, oxygen, conductivity and fluorescence, and move at up to 5 m/sec for 6-8 hours and down to 150 m. As a swarm, the vehicles will scan a body of water layer by layer, collecting geo-referenced data on the physical water parameters at different depth horizons. Data is to be transmitted to Hereon over a base station at the surface. The Quadroin project has completed and the vehicle can go into production and this is expected in Q1 next year, says Bustamante. Again, five vehicles have been trialled together.
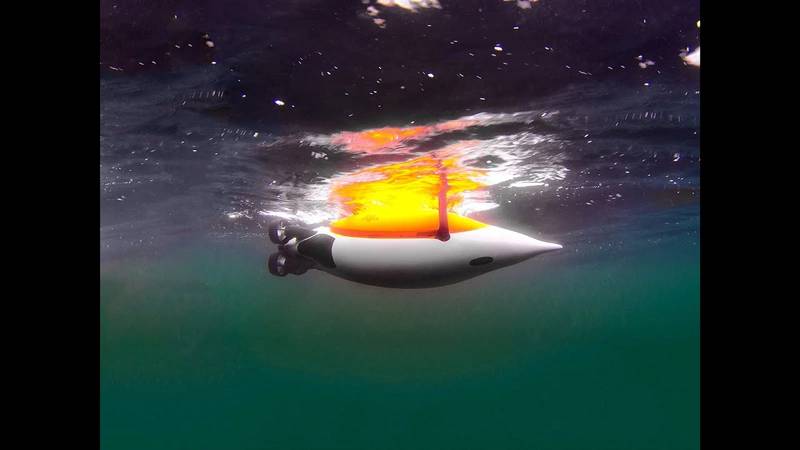 Photo courtesy Evologics
Photo courtesy Evologics
TDSX
Florida-based Tampa Deep Sea Xplorers (TDSX) was set up to enter the Shell Ocean Xprize and despite not winning the main prize it was a semi-finalist in the overall competition, second place in the National Oceanic and Atmospheric Administration (NOAA) challenge (a vehicle that could trace biological or chemical signals to their source under water) and came away with a $200,000 bonus prize. It’s cash that’s been used to continue the vehicle development – resulting in the 4 in-diameter, 1m-long, 12 kg in air, 500 m depth man-portable Barracuda AUV. It’s also had a further grant from NOAA to develop a compact underwater lidar system to go on the AUV or other man-portable AUVs.
The group is run by Ed Larson, a former deep sea diver in the Gulf of Mexico who moved into project management, but has always had a passion for robots, especially those underwater. He was part of Atlanta Hobby Robot Club and in the 1990s he had an idea to development a deep-water vehicle. When the Shell Ocean Xprize was launched, he decided to go for it and the team had great help from the Tampa Hackerspace, where Larson is a member and got access to wood and metal working facilities, 26 willing helpers and a wider pool of 200 experts from programmers and metal workers.
“What came out of the Xprize was that we saw the need for hand portable, hand launchable systems,” says Larson. “The deepwater ones (for Xprize) were about 90lb and that’s really not easily transportable. And we see that commercially the need for the mini AUV is greater than large ones – there are larger ones already and they require crew and a crane and that requires a boat and you’re starting to get into real money.”
The Barracuda has been designed to be easy to move around and then operate in pseudo swarms, to increase data collection speed, says Larson. Pseudo swarm means that multiple systems are deployed and programmed to go to way points. Then they have obstacle detection and avoidance on board using the visual aids and an Nvidia GPU, so if two are about to collide they’re programmed to avoid each other. The GPU will also support image recognition for search, find or follow missions, he says.
The vehicle itself is easy to transport, says Larson. “It breaks down into a duffle bag, and can be assembled in minutes,” he says. The vehicle has been tested in shallow fresh water and salt water, including the obstacle avoidance, and to tested to 500 psi (300 m).
 Photo courtesy Tampa Deep Sea Xplorers (TDSX)
Photo courtesy Tampa Deep Sea Xplorers (TDSX)
Hydromea
Swiss firm Hydromea has developed Vertex, a small AUV for swarm operations to gather 3D environmental water column data at 10 to 100 times less than traditional methods.
“The only way to get temporally consistent snapshots across a water volume is to deploy as many sensors in parallel as possible,” says the company. “Our drones are designed to carry these sensors to where they need to be and efficiently scan a body of water simultaneously collecting thousands of data points.”
The vehicle, which is currently in development (its first dive was seven years ago and it’s been tested under ice), is 70 cm-long and weighs about. It uses an LF RF system for communications and an acoustic system for localisation within the swarm, similar to an LBL concept and all developed by Hydromea. “One Vertex is either constantly tracking the swarm from the surface or coming up to pick up the GPS signal and to recalibrate the entire swarm down,” says Hydromea.
But it’s likely that the technology developed for swarm operations with Vertex will first see commercial use in another of Hydromea’s development; ExRay, a small inspection ROV that’s initially being developed for flooded, confined space inspections before being deployed in open water, initially down to 400 m.
Bedrock Ocean Exploration Launches "Full Service" Ocean Surveying
In August, Brooklyn, New York-based Bedrock Ocean Exploration (which is billed as a public benefit corporation) announced it had launched a “full service” ocean survey offering, using “fleets” of its own man-portable AUV platform and Mosaic, a survey cloud-based (subscription-based) data platform – to solve data gathering and processing/use problems.
The firm, founded in 2019 by CEO Anthony DiMare and former SpaceX and submarine engineer CTO Charles Chiau. Before co-founding Bedrock, DiMare co-founded Nautilus Labs, a technology company focused on maritime transportation. Before that he was a mechanical engineer at various tech start-up companies.
Bedrock, which says it’s offering technology that can speed up the time it takes to get seabed data by a factor of 10, raised $8 million in a seed round from Eniac Ventures, Primary Venture Partners, Quiet Capital and R7 in March
Bedrock’s goal is a commercial service, but also to provide a free public map of our oceans” and as part of this they’ve started ingesting NOAA National Centers for Environmental Information Data Center for Digital Bathymetry’s survey database.
Little information is available about the firm’s self-designed AUV, but visuals show a DVL and DiMare has said it can carry MBES, side scan sonar, magnetometer and sub-bottom profiler and makes operations easier because they can be shipped or flown more easily, and don’t need to be in containers or deployed by ships, like traditional survey AUVs. An August CNBC article shared by Bedrock says that the vehicles run for 12- or 24-hour missions, typically at a speed of 2 to 3 knots (or less than 5 mph) to conduct surveys up to 300 meters in depth. It also says the firm currently has just one vehicle, but plans to build and send fleets of them into the water and plans to double its staffing from 25 now to 50 in the next year. In June the firm took on Jim Snyder, formerly Field Engineering Manager at OceanServer, an L3Harris business.
 Image Courtesy Bedrock Ocean Exploration
Image Courtesy Bedrock Ocean Exploration

Read MTR100: When it Comes to Drones, Big is Good. <1m is Better. in Pdf, Flash or Html5 edition of Jul/Aug 2021 Marine Technology