
Page 20: of Marine Technology Magazine (September 2010)
Ocean Observation
Read this page in Pdf, Flash or Html5 edition of September 2010 Marine Technology Magazine
 19
19
 21
21
20 MTR September 2010 option reduces the chance of reflections of the LEDs on the water surface, thus improving measurement quality and accuracy. The engineering of the camera control soft- ware comprised the last stage of the development. An important requirement in the specifications was that the
UMS should be able to measure in the same coordinate system as the above-water system. This is essential for dis- connectable turret systems for instance, to be able to determine buoy positions with respect to the floater. A special calibration device was developed to be able to con- vert the UMS coordinate system to the MARIN standard coordinate system.
This new measurement system is able to measure 3 DoF of up to 30 individual LEDs (e.g. for riser shape measure- ment), or 6 DoF of up to 3 bodies, (e.g. for underwater buoys). The system can measure in a large area (maximum of 3 * 3 metres at a distance of 6 metres from the camera), with a typical specified measurement resolution of 0.02 mm and a specified measurement uncertainty of 0.3mm (U95).
In recent years the UMS system has been applied for numerous complex measurements. It enabled the study of disconnectable turret systems in survival conditions, hybrid riser towers and other subsea systems in current and waves. The accurate measurements made it possible to study motion behaviour but also possible interactions between different structures that could otherwise not have been quantified.
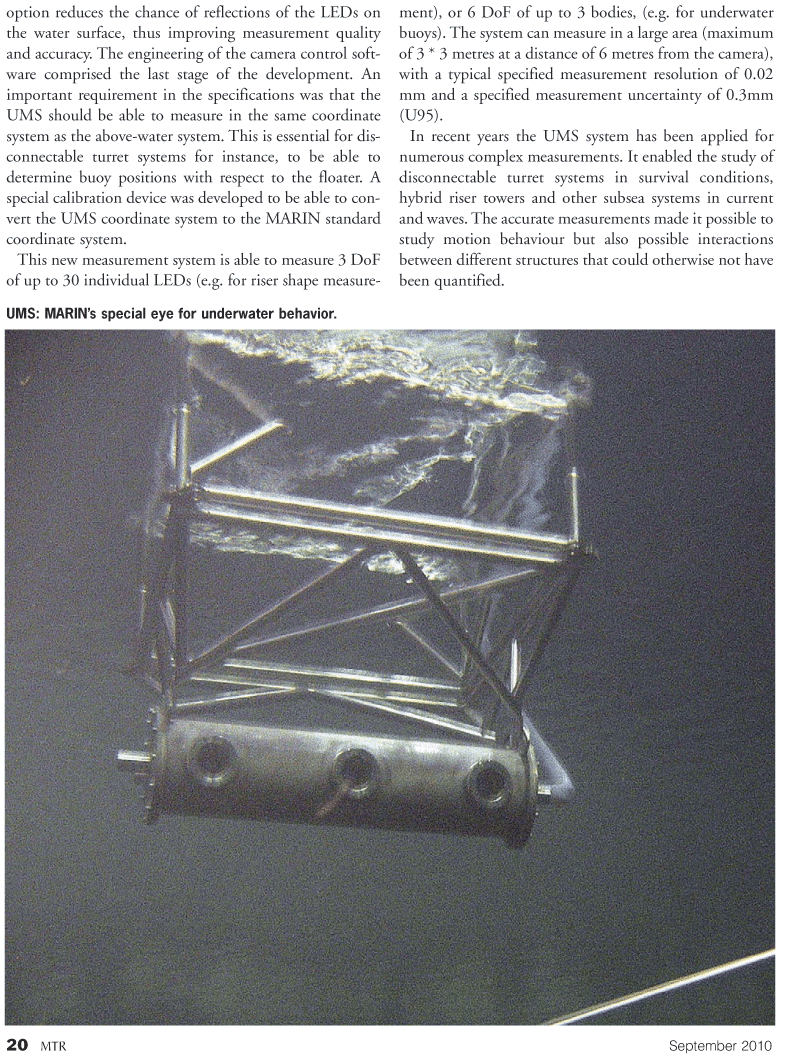
UMS: MARIN’s special eye for underwater behavior.