
Page 41: of Marine Technology Magazine (May 2012)
Hydrographic Survey
Read this page in Pdf, Flash or Html5 edition of May 2012 Marine Technology Magazine
 40
40
 42
42
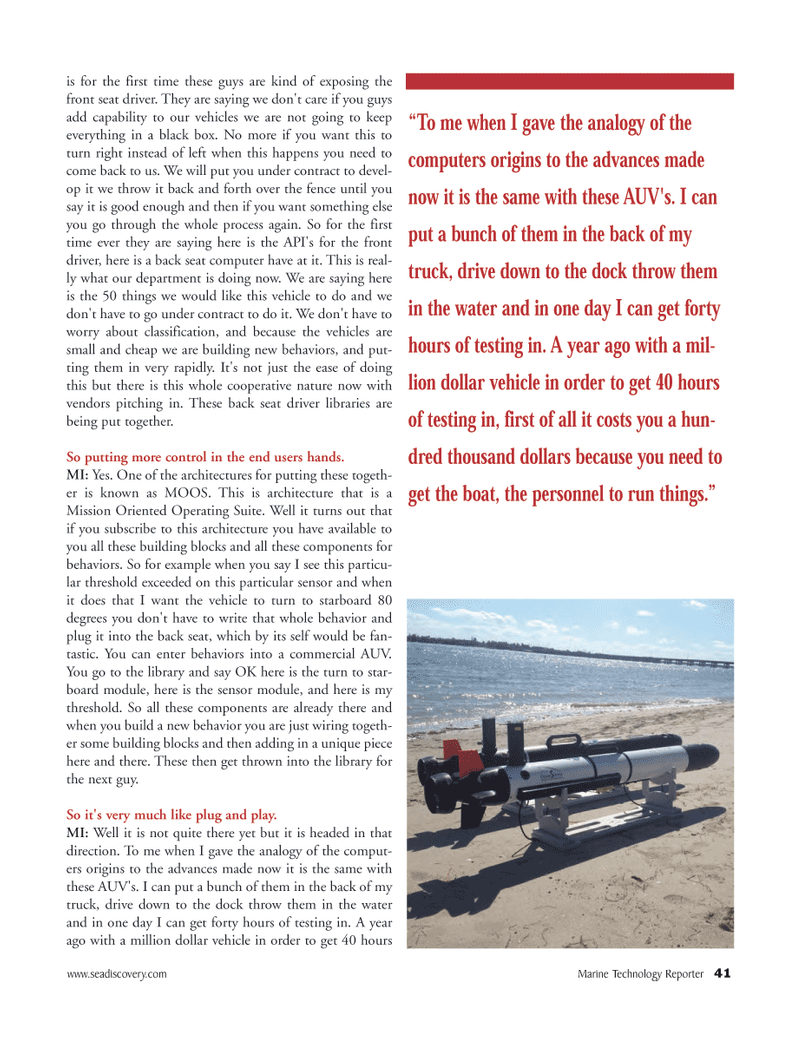
www.seadiscovery.com Marine Technology Reporter 41is for the first time these guys are kind of exposing the front seat driver. They are saying we don't care if you guys add capability to our vehicles we are not going to keep everything in a black box. No more if you want this to turn right instead of left when this happens you need to come back to us. We will put you under contract to devel- op it we throw it back and forth over the fence until you say it is good enough and then if you want something else you go through the whole process again. So for the first time ever they are saying here is the API's for the front driver, here is a back seat computer have at it. This is real- ly what our department is doing now. We are saying here is the 50 things we would like this vehicle to do and we don't have to go under contract to do it. We don't have to worry about classification, and because the vehicles are small and cheap we are building new behaviors, and put- ting them in very rapidly. It's not just the ease of doing this but there is this whole cooperative nature now with vendors pitching in. These back seat driver libraries are being put together. So putting more control in the end users hands. MI: Yes. One of the architectures for putting these togeth- er is known as MOOS. This is architecture that is a Mission Oriented Operating Suite. Well it turns out that if you subscribe to this architecture you have available to you all these building blocks and all these components for behaviors. So for example when you say I see this particu- lar threshold exceeded on this particular sensor and when it does that I want the vehicle to turn to starboard 80 degrees you don't have to write that whole behavior and plug it into the back seat, which by its self would be fan- tastic. You can enter behaviors into a commercial AUV. You go to the library and say OK here is the turn to star- board module, here is the sensor module, and here is my threshold. So all these components are already there and when you build a new behavior you are just wiring togeth- er some building blocks and then adding in a unique piecehere and there. These then get thrown into the library for the next guy. So it's very much like plug and play. MI: Well it is not quite there yet but it is headed in that direction. To me when I gave the analogy of the comput- ers origins to the advances made now it is the same with these AUV's. I can put a bunch of them in the back of my truck, drive down to the dock throw them in the water and in one day I can get forty hours of testing in. A year ago with a million dollar vehicle in order to get 40 hours ?To me when I gave the analogy of the computers origins to the advances made now it is the same with these AUV's. I can put a bunch of them in the back of my truck, drive down to the dock throw them in the water and in one day I can get forty hours of testing in. A year ago with a mil- lion dollar vehicle in order to get 40 hours of testing in, first of all it costs you a hun- dred thousand dollars because you need to get the boat, the personnel to run things.? MTR#4 (34-49):MTR Layouts 4/27/2012 9:45 AM Page 41