
Page 43: of Marine Technology Magazine (September 2013)
Ocean Observation: Gliders, Buoys & Sub-Surface monitoring Networks
Read this page in Pdf, Flash or Html5 edition of September 2013 Marine Technology Magazine
 42
42
 44
44
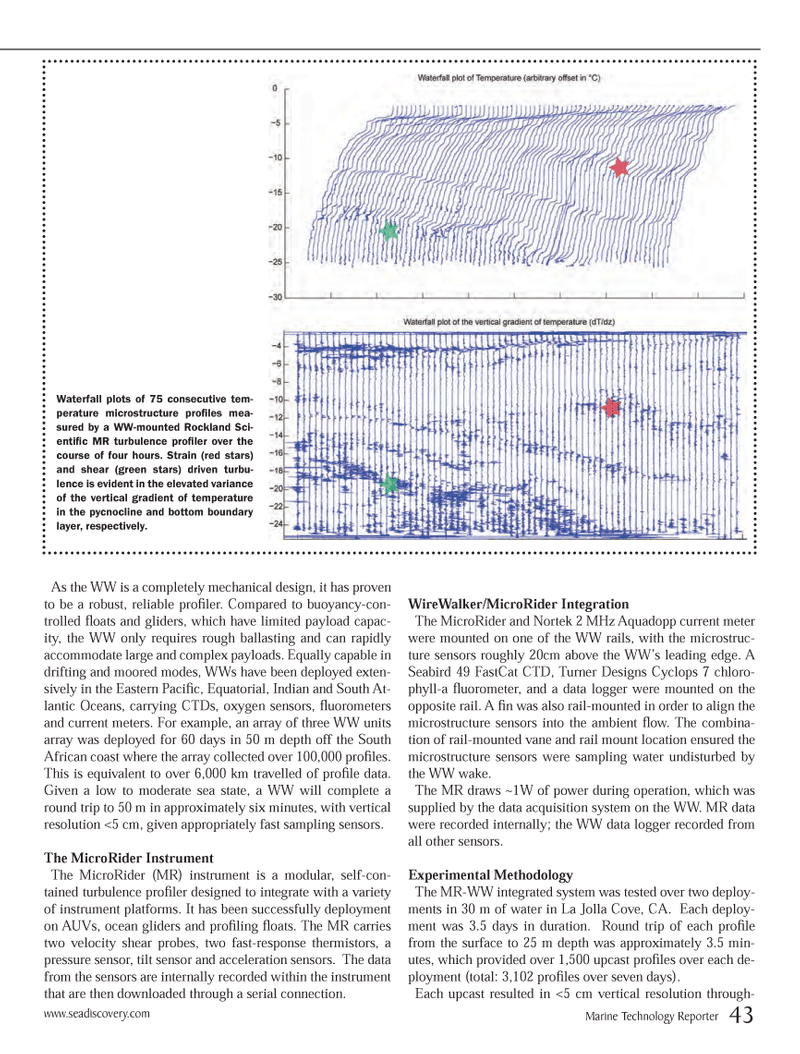
As the WW is a completely mechanical design, it has proven to be a robust, reliable proÞ ler. Compared to buoyancy-con- trolled ß oats and gliders, which have limited payload capac- ity, the WW only requires rough ballasting and can rapidly accommodate large and complex payloads. Equally capable in drifting and moored modes, WWs have been deployed exten- sively in the Eastern PaciÞ c, Equatorial, Indian and South At- lantic Oceans, carrying CTDs, oxygen sensors, ß uorometers and current meters. For example, an array of three WW units array was deployed for 60 days in 50 m depth off the South African coast where the array collected over 100,000 proÞ les. This is equivalent to over 6,000 km travelled of proÞ le data. Given a low to moderate sea state, a WW will complete a round trip to 50 m in approximately six minutes, with vertical resolution <5 cm, given appropriately fast sampling sensors. The MicroRider Instrument The MicroRider (MR) instrument is a modular, self-con- tained turbulence proÞ ler designed to integrate with a variety of instrument platforms. It has been successfully deployment on AUVs, ocean gliders and proÞ ling ß oats. The MR carries two velocity shear probes, two fast-response thermistors, a pressure sensor, tilt sensor and acceleration sensors. The data from the sensors are internally recorded within the instrument that are then downloaded through a serial connection. WireWalker/MicroRider Integration The MicroRider and Nortek 2 MHz Aquadopp current meter were mounted on one of the WW rails, with the microstruc- ture sensors roughly 20cm above the WWÕs leading edge. A Seabird 49 FastCat CTD, Turner Designs Cyclops 7 chloro- phyll-a ß uorometer, and a data logger were mounted on the opposite rail. A Þ n was also rail-mounted in order to align the microstructure sensors into the ambient ß ow. The combina- tion of rail-mounted vane and rail mount location ensured the microstructure sensors were sampling water undisturbed by the WW wake. The MR draws ~1W of power during operation, which was supplied by the data acquisition system on the WW. MR data were recorded internally; the WW data logger recorded from all other sensors.Experimental MethodologyThe MR-WW integrated system was tested over two deploy- ments in 30 m of water in La Jolla Cove, CA. Each deploy- ment was 3.5 days in duration. Round trip of each proÞ le from the surface to 25 m depth was approximately 3.5 min- utes, which provided over 1,500 upcast proÞ les over each de- ployment (total: 3,102 proÞ les over seven days). Each upcast resulted in <5 cm vertical resolution through- Waterfall plots of 75 consecutive tem- perature microstructure pro Þ les mea- sured by a WW-mounted Rockland Sci- entiÞ c MR turbulence pro Þ ler over the course of four hours. Strain (red stars) and shear (green stars) driven turbu- lence is evident in the elevated variance of the vertical gradient of temperature in the pycnocline and bottom boundary layer, respectively. www.seadiscovery.com Marine Technology Reporter 43MTR #7 (34-49).indd 43MTR #7 (34-49).indd 438/22/2013 11:04:41 AM8/22/2013 11:04:41 AM