
Page 64: of Marine Technology Magazine (March 2014)
Instrumentation: Measurement, Process & Analysis
Read this page in Pdf, Flash or Html5 edition of March 2014 Marine Technology Magazine
 63
63
 65
65
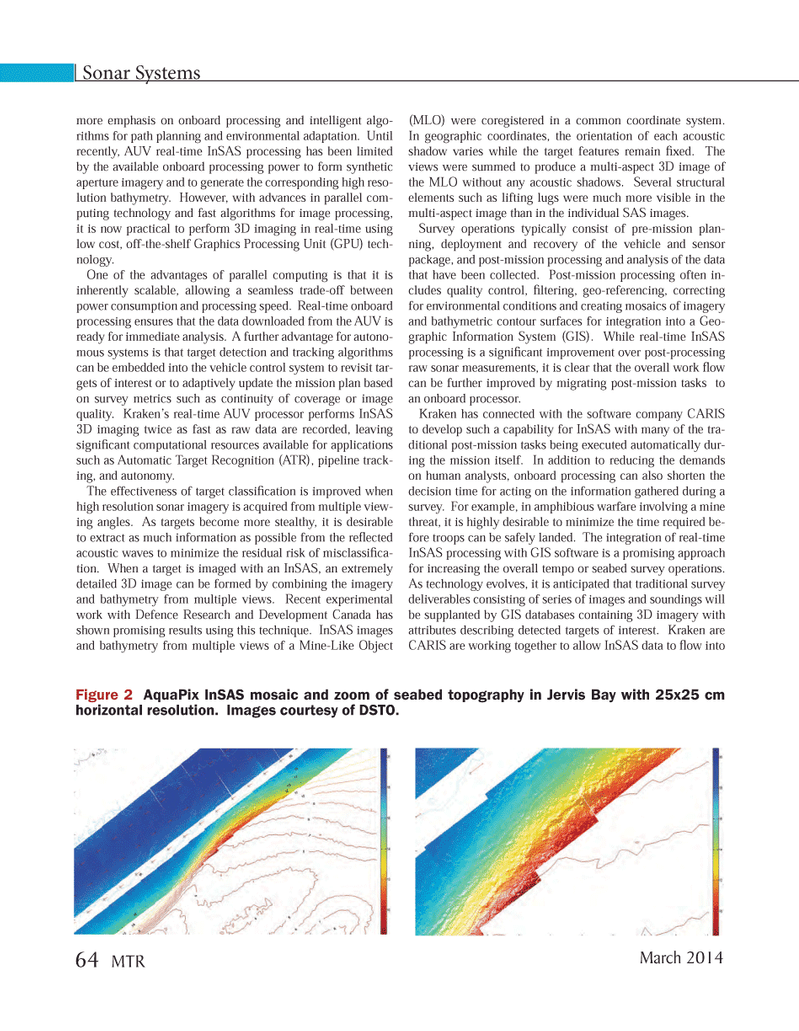
more emphasis on onboard processing and intelligent algo-rithms for path planning and environmental adaptation. Until recently, AUV real-time InSAS processing has been limited by the available onboard processing power to form synthetic aperture imagery and to generate the corresponding high reso-lution bathymetry. However, with advances in parallel com- puting technology and fast algorithms for image processing, it is now practical to perform 3D imaging in real-time using low cost, off-the-shelf Graphics Processing Unit (GPU) tech- nology. One of the advantages of parallel computing is that it is inherently scalable, allowing a seamless trade-off between power consumption and processing speed. Real-time onboard processing ensures that the data downloaded from the AUV is ready for immediate analysis. A further advantage for autono- mous systems is that target detection and tracking algorithms can be embedded into the vehicle control system to revisit tar- gets of interest or to adaptively update the mission plan based on survey metrics such as continuity of coverage or image quality. Kraken?s real-time AUV processor performs InSAS 3D imaging twice as fast as raw data are recorded, leaving signi cant computational resources available for applications such as Automatic Target Recognition (ATR), pipeline track- ing, and autonomy. The effectiveness of target classi cation is improved when high resolution sonar imagery is acquired from multiple view- ing angles. As targets become more stealthy, it is desirable to extract as much information as possible from the re ected acoustic waves to minimize the residual risk of misclassi ca-tion. When a target is imaged with an InSAS, an extremely detailed 3D image can be formed by combining the imagery and bathymetry from multiple views. Recent experimental work with Defence Research and Development Canada has shown promising results using this technique. InSAS images and bathymetry from multiple views of a Mine-Like Object (MLO) were coregistered in a common coordinate system. In geographic coordinates, the orientation of each acoustic shadow varies while the target features remain xed. The views were summed to produce a multi-aspect 3D image of the MLO without any acoustic shadows. Several structural elements such as lifting lugs were much more visible in the multi-aspect image than in the individual SAS images. Survey operations typically consist of pre-mission plan- ning, deployment and recovery of the vehicle and sensor package, and post-mission processing and analysis of the data that have been collected. Post-mission processing often in- cludes quality control, ltering, geo-referencing, correcting for environmental conditions and creating mosaics of imagery and bathymetric contour surfaces for integration into a Geo- graphic Information System (GIS). While real-time InSAS processing is a signi cant improvement over post-processing raw sonar measurements, it is clear that the overall work ow can be further improved by migrating post-mission tasks to an onboard processor. Kraken has connected with the software company CARIS to develop such a capability for InSAS with many of the tra- ditional post-mission tasks being executed automatically dur- ing the mission itself. In addition to reducing the demands on human analysts, onboard processing can also shorten the decision time for acting on the information gathered during a survey. For example, in amphibious warfare involving a mine threat, it is highly desirable to minimize the time required be-fore troops can be safely landed. The integration of real-time InSAS processing with GIS software is a promising approach for increasing the overall tempo or seabed survey operations. As technology evolves, it is anticipated that traditional survey deliverables consisting of series of images and soundings will be supplanted by GIS databases containing 3D imagery with attributes describing detected targets of interest. Kraken are CARIS are working together to allow InSAS data to ow into Sonar Systems Figure 2 AquaPix InSAS mosaic and zoom of seabed topography in Jervis Bay with 25x25 cm horizontal resolution. Images courtesy of DSTO. March 2014 64 MTRMTR #2 (50-65).indd 64MTR #2 (50-65).indd 642/21/2014 11:41:42 AM2/21/2014 11:41:42 AM