
Page 34: of Marine Technology Magazine (June 2015)
Hydrographic Survey
Read this page in Pdf, Flash or Html5 edition of June 2015 Marine Technology Magazine
 33
33
 35
35
Hydrographic Survey
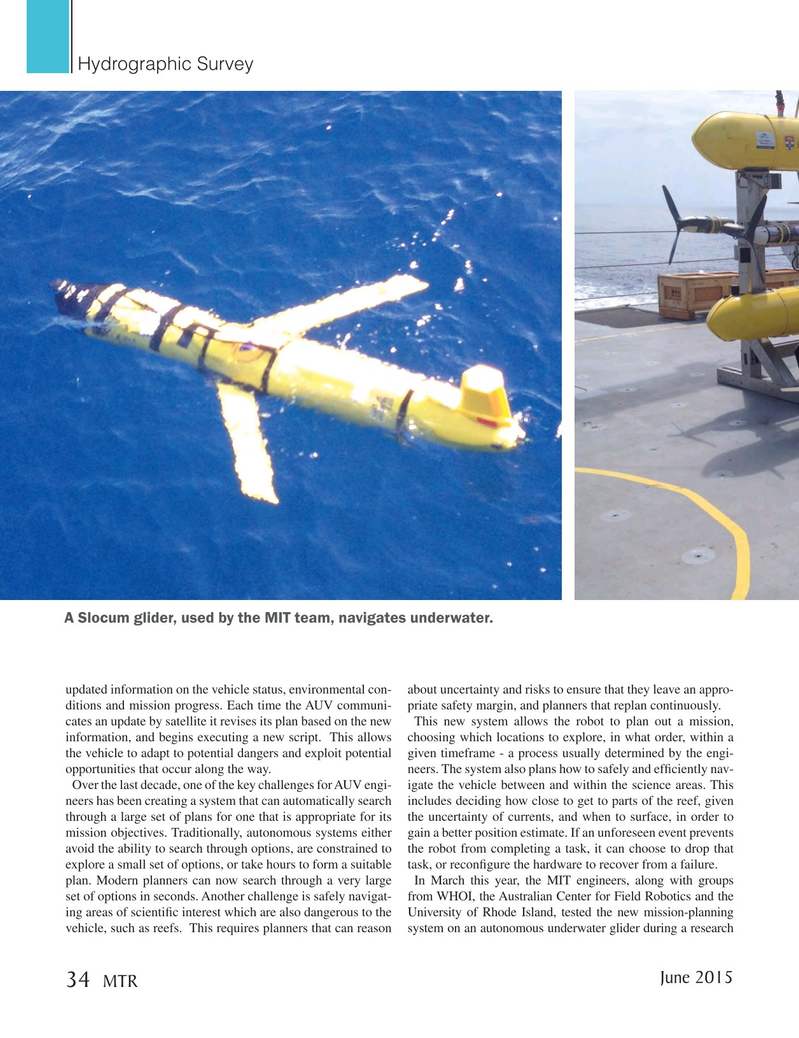
A Slocum glider, used by the MIT team, navigates underwater.
updated information on the vehicle status, environmental con- about uncertainty and risks to ensure that they leave an appro- ditions and mission progress. Each time the AUV communi- priate safety margin, and planners that replan continuously.
cates an update by satellite it revises its plan based on the new This new system allows the robot to plan out a mission, information, and begins executing a new script. This allows choosing which locations to explore, in what order, within a the vehicle to adapt to potential dangers and exploit potential given timeframe - a process usually determined by the engi- opportunities that occur along the way. neers. The system also plans how to safely and ef? ciently nav-
Over the last decade, one of the key challenges for AUV engi- igate the vehicle between and within the science areas. This neers has been creating a system that can automatically search includes deciding how close to get to parts of the reef, given through a large set of plans for one that is appropriate for its the uncertainty of currents, and when to surface, in order to mission objectives. Traditionally, autonomous systems either gain a better position estimate. If an unforeseen event prevents avoid the ability to search through options, are constrained to the robot from completing a task, it can choose to drop that explore a small set of options, or take hours to form a suitable task, or recon? gure the hardware to recover from a failure.
plan. Modern planners can now search through a very large In March this year, the MIT engineers, along with groups set of options in seconds. Another challenge is safely navigat- from WHOI, the Australian Center for Field Robotics and the ing areas of scienti? c interest which are also dangerous to the University of Rhode Island, tested the new mission-planning vehicle, such as reefs. This requires planners that can reason system on an autonomous underwater glider during a research
June 2015
MTR 34
MTR #5 (34-49).indd 34 MTR #5 (34-49).indd 34 6/11/2015 10:18:44 AM6/11/2015 10:18:44 AM