
Page 33: of Marine Technology Magazine (September 2017)
Ocean Observation: Gliders, Buoys & Sub-Surface Networks
Read this page in Pdf, Flash or Html5 edition of September 2017 Marine Technology Magazine
 32
32

 34
34
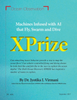
IN SITU
SEAWATER DENSITY a path for energy ef? ciency while also tion for us to solve algorithmically. It
MEASUREMENT trying to gather information that will involves ? guring out what the trade-offs inform ef? cient path planning? Jones are and how much do we care about one explained, “There will be trade-offs, data set versus another.”
WORLD that might include decisions such as In the ideal world, the technology
PREMIERE ! sacri? cing ? ve hours early in the mis- should be in place that allows the hu- sion to save six hours later. Another man to focus on high-level tasks – such possible direction is to look at coopera- as considering how the data is useful tion between multiple vehicles. In this and what other data the robots should be
NOSS SENSOR scenario, one vehicle ‘wastes’ energy collecting. The robot, however, should by scouting ahead and relays informa- manage the lower level calculations – tion so the other vehicle(s) can take the for example, how does it best and most most ef? cient path – working as a unit, ef? ciently collect the data that the hu- this could mean a low shared energy man wants. cost by intelligently assigning goals and Jones said, “Humans have an intuition sharing information. But one of the hard about what is ef? cient – we know we parts about robotics research is getting don’t want to go against the current – this entire system to work together. It is but they would struggle to do the calcu- often just as hard as building the initial lations while traveling across the path. algorithm in the ? rst place.” This is where the potential of robotics really shines. As engineers, we need to start thinking about how we can tease
Progressing AI in the those tasks apart so the human can do
Ocean Environment
Over the next decade advancements in what they’re good at and the robots can this ? eld will progress the industry clos- do what they’re good at. This is some- er towards the perfect synergy between thing else that our lab works on and it humans and machines. The way we is ultimately what the industry should control underwater vehicles at present strive towards - the idea of shared auton- is relatively limited, leaving a lot of po- omy. We need to learn how robots and tential over the next few years for more humans best work together in the ocean autonomy to be built in. Jones added, environment so we can design solutions
Density “I think there will always be a human that allow us to collaborate in a way that
Absolute salinity element in ocean robotics. Maybe the strengthens both capabilities.” oceanographer will see something they
Refractive index ? nd fascinating during a mission, and want to change the parameters to ex- Acknowledgements
Pressure plore it further. That is a very hard ques- Dylan Jones, Oregon State University
Temperature
POSSIBLE USE
Embedding on CTD probes, buoys, profiling floats,
AUV, gliders...
Credit: Dylan Jones www.marinetechnologynews.com www.nke-instrumentation.com
MTR #7 (18-33).indd 33 MTR #7 (18-33).indd 33 8/22/2017 11:49:51 AM8/22/2017 11:49:51 AM