
Page 38: of Marine Technology Magazine (Sep/Oct 2017)
Ocean Observation: Gliders, Buoys & Sub-Surface Networks
Read this page in Pdf, Flash or Html5 edition of Sep/Oct 2017 Marine Technology Magazine
 37
37
 39
39
Ocean Observation the Marine Bees out to sea, launch them into the ocean and the pod to another location to start the process again. The SO- retrieve them after the dive. Mission control will communicate NAR data will be processed as it is obtained via cloud-based with the hive from shore, and the hive will communicate with servers to generate a bathymetry map.
the Marine Bees. Prototypes of its heavy lift drone have been tested in North
Carolina’s Duke Forest, and the team has been using the ocean
Duke’s High Capacity Drones and Drop Pods off of the North Carolina coast to test pod prototypes to 2,000
Team Lead: Martin Brooke meter depth for Round 1 of the contest. It’s truly a team effort:
The Blue Devil Engineering team based out of Duke Univer- undergraduate students are working on mapping algorithms sity is using drones, drop pods and machine learning to map in a Duke Data+ Summer Program and they are hosting 12 the sea? oor. Led by Professors Martin Brooke, Tyler Bletsch high school students with robotics experience to help with and Douglas Nowacek, the team is an enthusiastic group of their ? nal build. In the fall of 2017, about 40 undergraduate high school, undergraduate and graduate students working and graduate students will work on the project, deploying for together to develop their solution in classes and in their free Round 1 and prototyping for Round 2 of the contest.
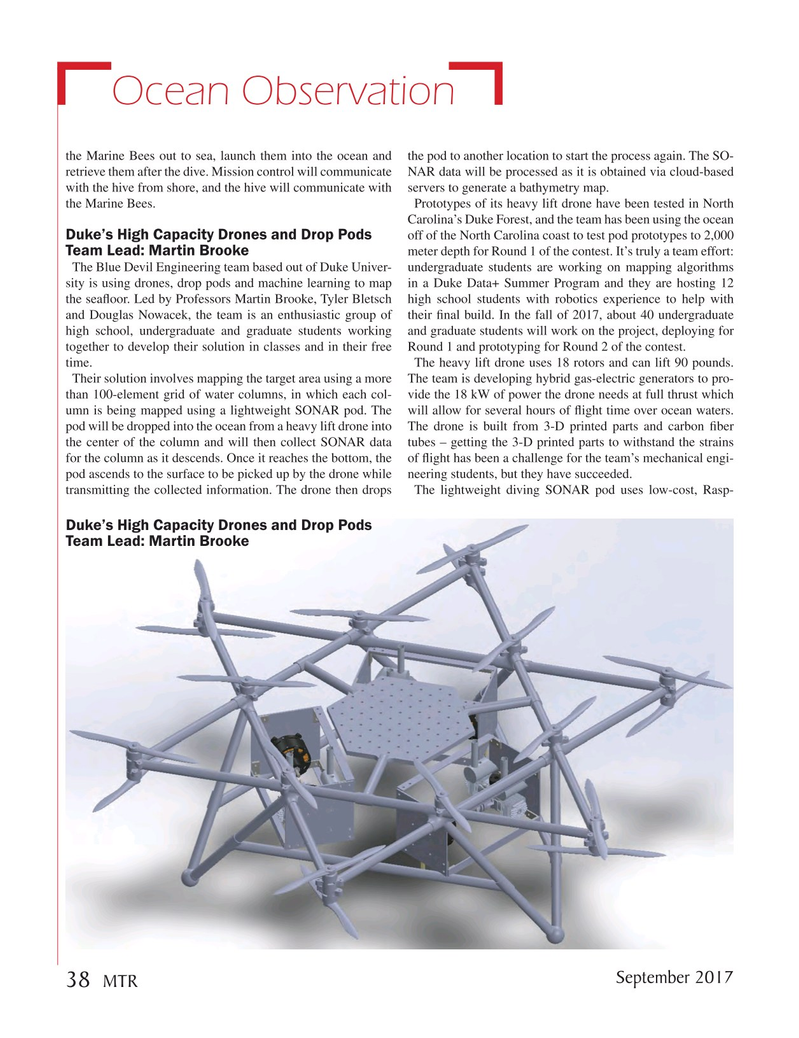
time. The heavy lift drone uses 18 rotors and can lift 90 pounds.
Their solution involves mapping the target area using a more The team is developing hybrid gas-electric generators to pro- than 100-element grid of water columns, in which each col- vide the 18 kW of power the drone needs at full thrust which umn is being mapped using a lightweight SONAR pod. The will allow for several hours of ? ight time over ocean waters. pod will be dropped into the ocean from a heavy lift drone into The drone is built from 3-D printed parts and carbon ? ber the center of the column and will then collect SONAR data tubes – getting the 3-D printed parts to withstand the strains for the column as it descends. Once it reaches the bottom, the of ? ight has been a challenge for the team’s mechanical engi- pod ascends to the surface to be picked up by the drone while neering students, but they have succeeded.
transmitting the collected information. The drone then drops The lightweight diving SONAR pod uses low-cost, Rasp-
Duke’s High Capacity Drones and Drop Pods
Team Lead: Martin Brooke
September 2017 38
MTR
MTR #7 (34-49).indd 38 MTR #7 (34-49).indd 38 8/23/2017 4:15:15 PM8/23/2017 4:15:15 PM