
Page 30: of Marine Technology Magazine (October 2017)
AUV Operations
Read this page in Pdf, Flash or Html5 edition of October 2017 Marine Technology Magazine
 29
29
 31
31
AUVs with the others in the ? eet to achieve a common goal; and model. This can be achieved by integrating the vehicles onto thirdly over-the-horizon operations where the ? eet is able to a shared command station which providing a central control perform tasks autonomously supported only by a launch and capability.
recovery team. This gives rise to the third and ? nal thread of autonomy:
In essence, true adaptive autonomy is goal-based planning over-the-horizon operations. The crux of this approach re- means telling robots what to do rather than how to do it. With lies on goal-based mission planning; the ? eet is assigned a a goal-based architecture the user provides the vehicle with a task or tasks to accomplish by the operator pre-deployment set of goals, examples of which may be to survey an area or to but software decides the optimal approach based on the feed- look for certain objects. The vehicle and its software engine back from the vehicle payloads. The technologies developed compute what waypoints are necessary in order to accomplish provide the ? rst major steps toward a paradigm shift: a move those goals while staying out of identi? ed hazardous areas. away from men on the frontline operations towards unmanned
Goal-based autonomy simpli? es human machine interaction over-the-horizon multi-squad operations supported by a in that the human just states what they want to accomplish. shore-side team.
The software engine using goal based autonomy does the mis- But how do we go from an unmanned system that follows sion planning and is able to leverage from all the available waypoints to a team of vehicles that make and communicate expertise programmed into it and learned from previous mis- decisions? First and foremost, autonomy relies on the software sions to generate optimal plans. underpinning the vehicles. Limited software design which is
Secondly, to create an autonomous ? eet of vehicles, it is only designed to work with one particular system will inevi- essential that they are able to communicate with each other tably lead to limited autonomy. Ideally the most success is through a shared ‘language’, regardless of vehicle make or found using a goal-based, open, modular, scalable architec-
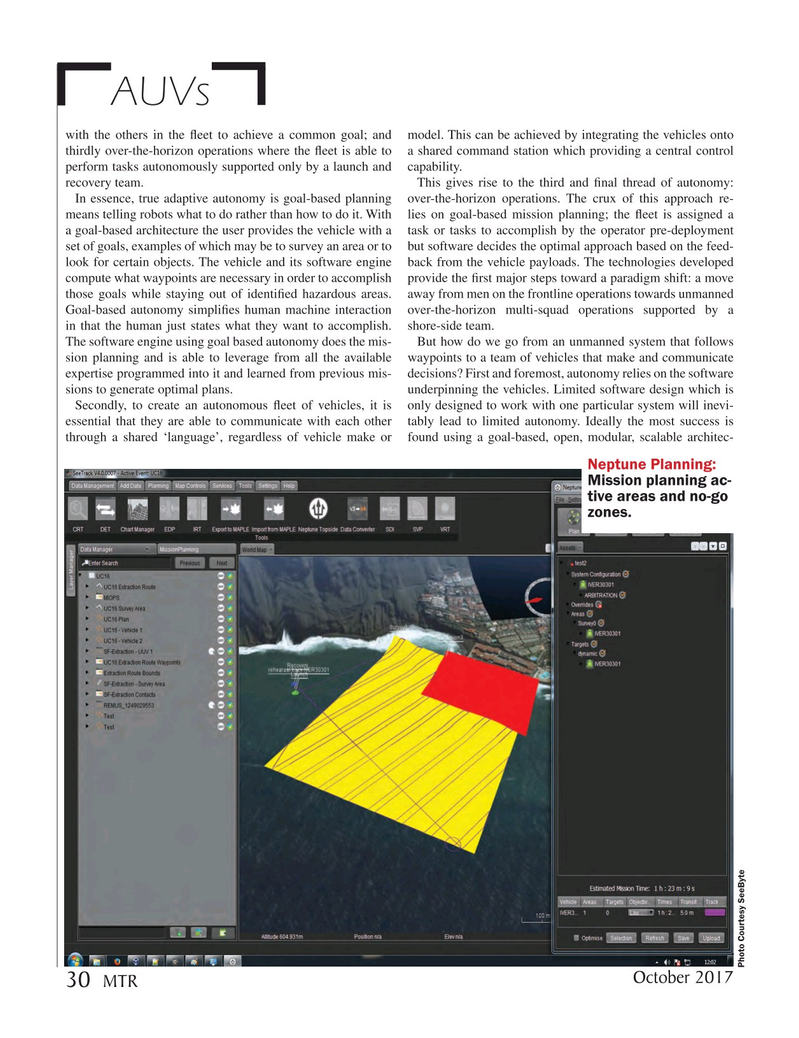
Neptune Planning:
Mission planning ac- tive areas and no-go zones.
Photo Courtesy SeeByte
October 2017 30 MTR
MTR #8 (18-33).indd 30 MTR #8 (18-33).indd 30 9/28/2017 2:24:33 PM9/28/2017 2:24:33 PM