
Page 22: of Marine Technology Magazine (April 2020)
Read this page in Pdf, Flash or Html5 edition of April 2020 Marine Technology Magazine
 21
21
 23
23
FEATURE UUVs mission outcomes. This culminates in a aim to reduce staffng onshore with auton- cialty research and development projects, perspective of nested capabilities, includ- omous data processing. A key in this vi- most funded by NASA, they introduced ing deep learning, machine learning, and sion is effciency with scale of operations their frst commercial concept, Sunfsh, true artifcial intelligence. and reliability from many interchangeable in a briefng by Kristof Richmond, “Dem-
EIVA’s Antonio Felipe Siva presented vehicles, which they term AxVs. onstrations of a human-portable hovering “Visually Aided Navigation and Auto- The Terradepth Concept of Operations AUV for complex 3D environments.” This mated Subsea Inspection Using Deep (CONOPS) includes: 1) surface and sub- addressed both a new AUV design and a
Learning and Computer Vision” a briefng surface capability, 2) two or more identical powerful software offering.
on how their software employs machine vehicles, 3) launch from shore or sea, 4) The vehicle itself is described as able to learning. In particular they use it for ad- open ocean transit to survey site, 5) extend- fy like a jet and hover like a helicopter. It vanced subsea feature tracking. They re- ed time at sea, 6) multi-vehicle cooperation, is a person-portable system that addresses cently released a paper describing a new and 7) Precision data gathering. This is ex- many challenges of autonomous explora- feature detection algorithm that outper- ecuted via a single confguration of hybrid tion in complex environments. The AUV forms current algorithms in the market, autonomous marine vehicle surface and is designed to operate in a wide variety which will be used in their software tools. subsurface system. Terradepth has a patent of undersea environments, ranging from
The software tools can generate a three- pending for this CONOPS and is currently man-made, such as piers or harbors, to nat- dimensional mesh from any point cloud or preparing for initial demonstrations in mid- ural, reefs or caves. The core vehicle is 1.6 sonar, and from analyzed video data. The 2020. In this concept the individual AxVs meters long, 0.47 meters wide and only end product is a “3D mesh” with the “full employ autonomy concepts similar to the 0.2 meters high. At 50 kilograms in weight resolution of the image” even though the AUV and USV ideas discussed by Kongs- the system is highly portable. SUNFISH underlying point-cloud has been reduced. berg. But the overall network also offers can stop in mid “fight,” hover, and per-
Another presentation of novel ideas opportunities for new approaches to feet form proximity operations along objects it came from Terradepth’s Ken Childress. management and individual AxV tasking. has mapped and do so at specifed stand-
This new startup in Austin, Texas is pio- While the Terradepth ideas are based off ranges while acquiring high-resolution neering a networked systems approach on new vehicle designs and Kongsberg photos and geometry. This precision, com- for ocean data collection. Their approach focused on discussing the software/au- bined with sophisticated artifcial intelli- aims to extend mission duration with high tonomy elements of unmanned maritime gence, makes SUNFISH ideal for complex power payload capacity while limiting off- systems, another new entrant addressed and combined environments.
shore personnel through autonomous data both. Stone Aerospace is also based in During operations SUNFISH can report collection and quality assurance. They also Austin, Texas. After many years of spe- back, using an optional data-only tether,
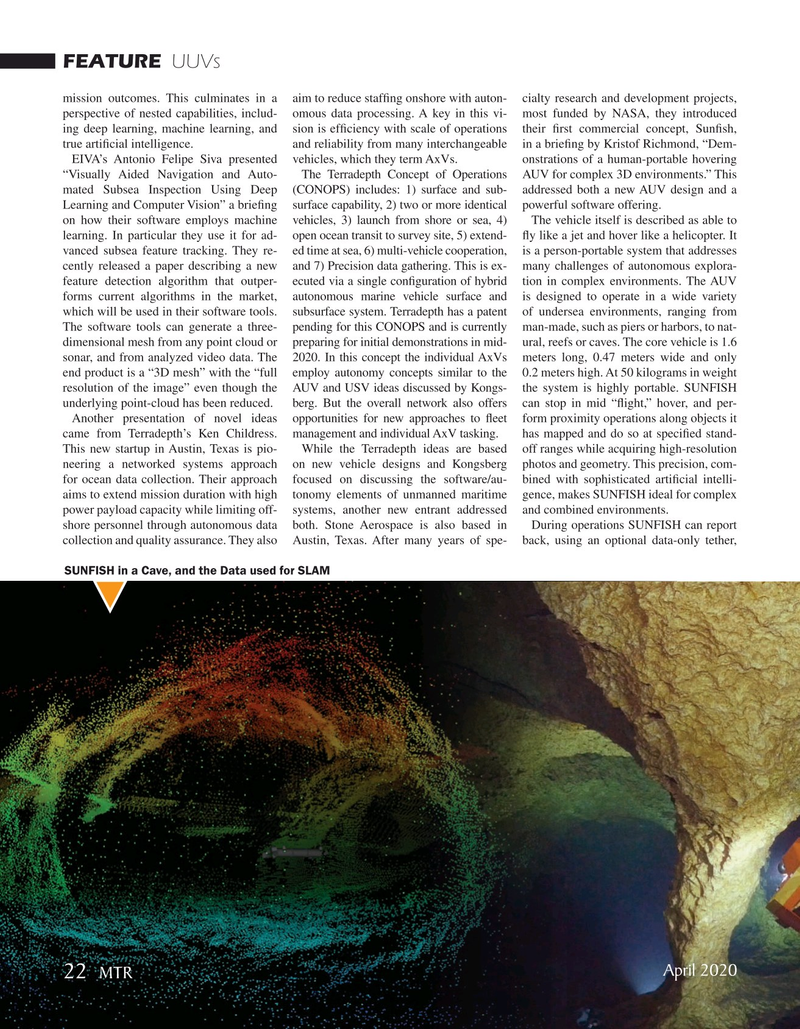
SUNFISH in a Cave, and the Data used for SLAM April 2020 22
MTR