
Page 22: of Marine Technology Magazine (January 2021)
Underwater Vehicle Annual
Read this page in Pdf, Flash or Html5 edition of January 2021 Marine Technology Magazine
 21
21
 23
23
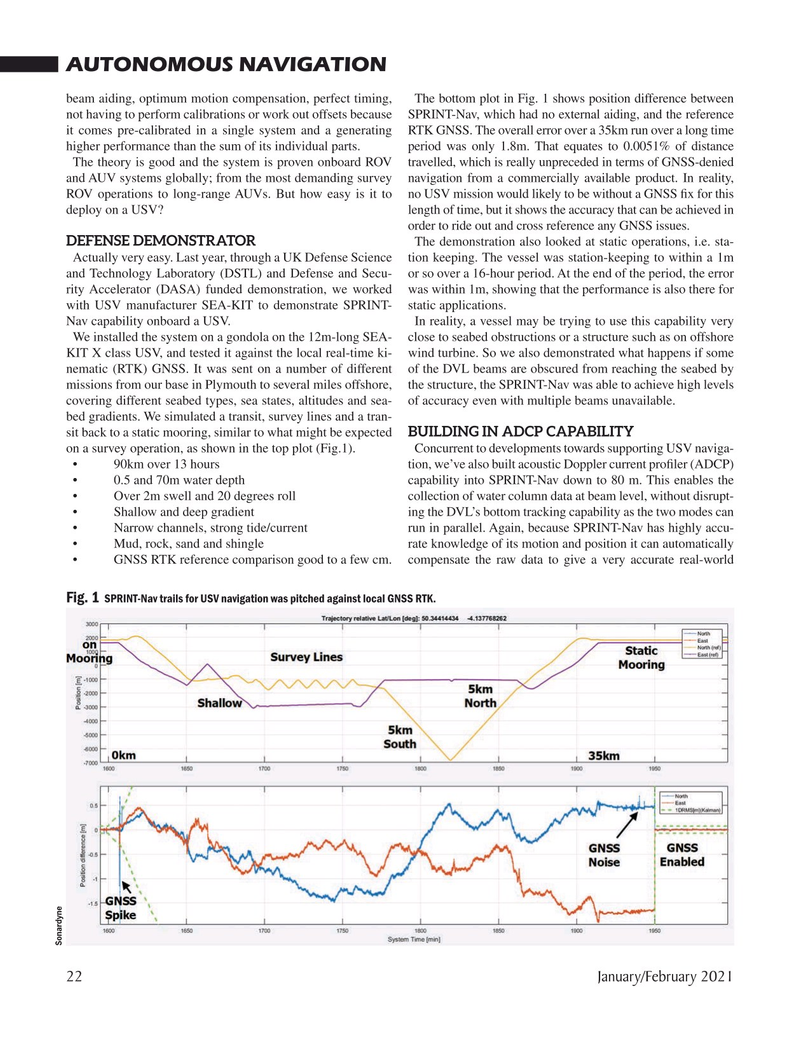
AUTONOMOUS NAVIGATION beam aiding, optimum motion compensation, perfect timing, The bottom plot in Fig. 1 shows position difference between not having to perform calibrations or work out offsets because SPRINT-Nav, which had no external aiding, and the reference it comes pre-calibrated in a single system and a generating RTK GNSS. The overall error over a 35km run over a long time higher performance than the sum of its individual parts. period was only 1.8m. That equates to 0.0051% of distance
The theory is good and the system is proven onboard ROV travelled, which is really unpreceded in terms of GNSS-denied and AUV systems globally; from the most demanding survey navigation from a commercially available product. In reality,
ROV operations to long-range AUVs. But how easy is it to no USV mission would likely to be without a GNSS ? x for this deploy on a USV? length of time, but it shows the accuracy that can be achieved in order to ride out and cross reference any GNSS issues.
DEFENSE DEMONSTRATOR The demonstration also looked at static operations, i.e. sta-
Actually very easy. Last year, through a UK Defense Science tion keeping. The vessel was station-keeping to within a 1m and Technology Laboratory (DSTL) and Defense and Secu- or so over a 16-hour period. At the end of the period, the error rity Accelerator (DASA) funded demonstration, we worked was within 1m, showing that the performance is also there for with USV manufacturer SEA-KIT to demonstrate SPRINT- static applications.
Nav capability onboard a USV. In reality, a vessel may be trying to use this capability very
We installed the system on a gondola on the 12m-long SEA- close to seabed obstructions or a structure such as on offshore
KIT X class USV, and tested it against the local real-time ki- wind turbine. So we also demonstrated what happens if some nematic (RTK) GNSS. It was sent on a number of different of the DVL beams are obscured from reaching the seabed by missions from our base in Plymouth to several miles offshore, the structure, the SPRINT-Nav was able to achieve high levels covering different seabed types, sea states, altitudes and sea- of accuracy even with multiple beams unavailable. bed gradients. We simulated a transit, survey lines and a tran- sit back to a static mooring, similar to what might be expected BUILDING IN ADCP CAPABILITY on a survey operation, as shown in the top plot (Fig.1). Concurrent to developments towards supporting USV naviga- • 90km over 13 hours tion, we’ve also built acoustic Doppler current pro? ler (ADCP) • 0.5 and 70m water depth capability into SPRINT-Nav down to 80 m. This enables the • Over 2m swell and 20 degrees roll collection of water column data at beam level, without disrupt- • Shallow and deep gradient ing the DVL’s bottom tracking capability as the two modes can • Narrow channels, strong tide/current run in parallel. Again, because SPRINT-Nav has highly accu- • Mud, rock, sand and shingle rate knowledge of its motion and position it can automatically • GNSS RTK reference comparison good to a few cm. compensate the raw data to give a very accurate real-world
Fig. 1 SPRINT-Nav trails for USV navigation was pitched against local GNSS RTK.
Sonardyne 22 January/February 2021
MTR #1 (18-33).indd 22 1/25/2021 9:06:13 AM