
Page 53: of Marine Technology Magazine (November 2021)
Ocean Observation: Gliders, Buoys & Sub-Surface Networks
Read this page in Pdf, Flash or Html5 edition of November 2021 Marine Technology Magazine
 52
52
 54
54
Tech File
Innovative new products, technologies and concepts
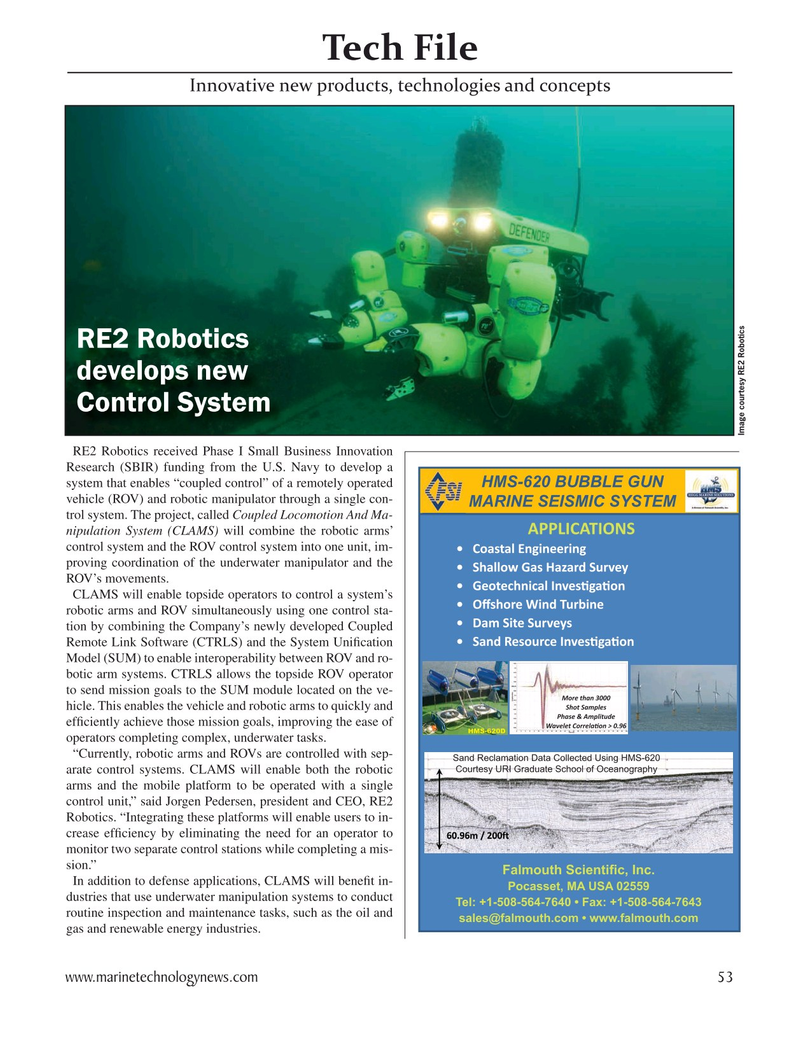
RE2 Robotics develops new
Control System
Image courtesy RE2 Robotics
RE2 Robotics received Phase I Small Business Innovation
Research (SBIR) funding from the U.S. Navy to develop a system that enables “coupled control” of a remotely operated
HMS-620 BUBBLE GUN vehicle (ROV) and robotic manipulator through a single con-
MARINE SEISMIC SYSTEM trol system. The project, called Coupled Locomotion And Ma- APPLICATIONS nipulation System (CLAMS) will combine the robotic arms’ control system and the ROV control system into one unit, im- ?ŽA?lAuYOsYGG?sYO proving coordination of the underwater manipulator and the ?^SAuuŽ?'A?,A?A?E^??|G?
ROV’s movements.
?'GŽlGÐSYsÐAu/Y|G?OOAOŽY
CLAMS will enable topside operators to control a system’s ?Ki?SŽ?GtsYEd??dsYG robotic arms and ROV simultaneously using one control sta- ?Aw^slG^??|G??
tion by combining the Company’s newly developed Coupled ?^AYEZG?Ž??ÐG/Y|G?OOAOŽY
Remote Link Software (CTRLS) and the System Uni? cation
Model (SUM) to enable interoperability between ROV and ro- botic arm systems. CTRLS allows the topside ROV operator to send mission goals to the SUM module located on the ve-
More than 3000
Shot Samples hicle. This enables the vehicle and robotic arms to quickly and
Phase & Amplitude ef? ciently achieve those mission goals, improving the ease of tA|GuGlŽ??GuAOŽY?????
HMS-620D operators completing complex, underwater tasks.
“Currently, robotic arms and ROVs are controlled with sep-
Sand Reclamation Data Collected Using HMS-620
Courtesy URI Graduate School of Oceanography arate control systems. CLAMS will enable both the robotic arms and the mobile platform to be operated with a single control unit,” said Jorgen Pedersen, president and CEO, RE2
Robotics. “Integrating these platforms will enable users to in- crease ef? ciency by eliminating the need for an operator to monitor two separate control stations while completing a mis- sion.” )DOPRXWK6FLHQWL¿F,QF
In addition to defense applications, CLAMS will bene? t in- 3RFDVVHW0$86$ dustries that use underwater manipulation systems to conduct 7HO?)D[ routine inspection and maintenance tasks, such as the oil and
VDOHV#IDOPRXWKFRP?ZZZIDOPRXWKFRP gas and renewable energy industries.
www.marinetechnologynews.com 53
MTR #8 (50-63).indd 53 11/24/2021 8:51:35 AM