
Page 25: of Marine Technology Magazine (September 2022)
Read this page in Pdf, Flash or Html5 edition of September 2022 Marine Technology Magazine
 24
24
 26
26
Tech Talk: Cuttlefish AUV
Marc/Adobestock
A consortium led by the German Research Center for
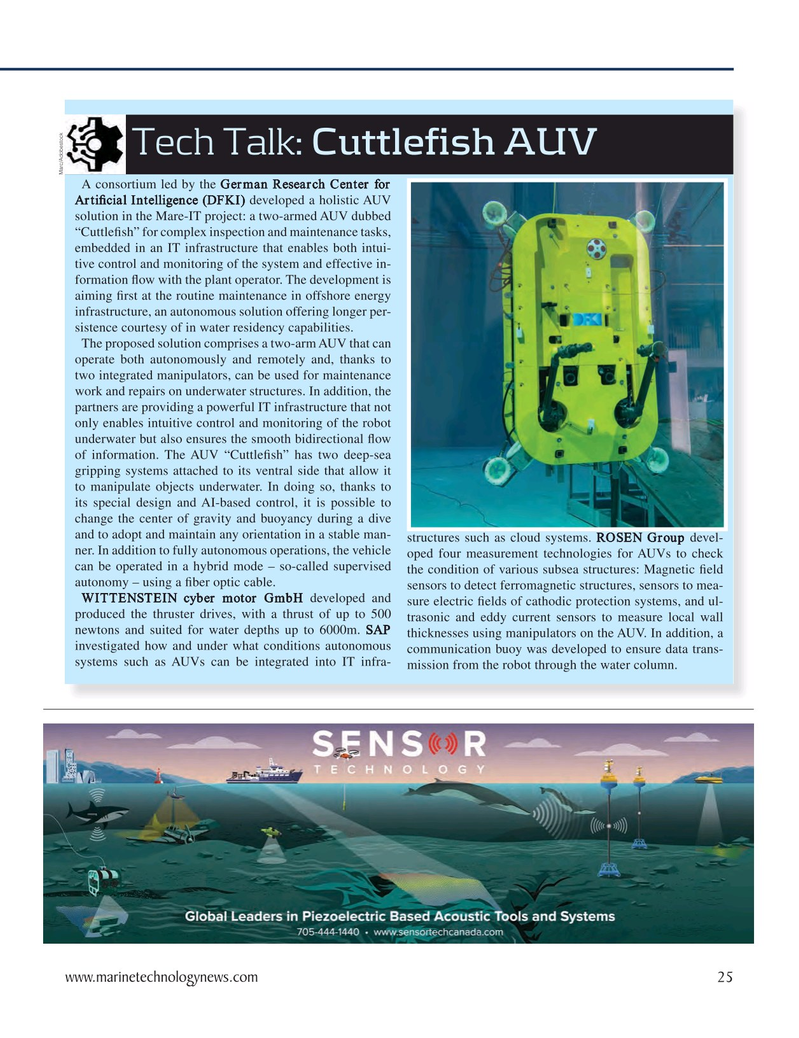
Arti? cial Intelligence (DFKI) developed a holistic AUV solution in the Mare-IT project: a two-armed AUV dubbed “Cuttle? sh” for complex inspection and maintenance tasks, embedded in an IT infrastructure that enables both intui- tive control and monitoring of the system and effective in- formation ? ow with the plant operator. The development is aiming ? rst at the routine maintenance in offshore energy infrastructure, an autonomous solution offering longer per- sistence courtesy of in water residency capabilities.
The proposed solution comprises a two-arm AUV that can operate both autonomously and remotely and, thanks to two integrated manipulators, can be used for maintenance work and repairs on underwater structures. In addition, the partners are providing a powerful IT infrastructure that not only enables intuitive control and monitoring of the robot underwater but also ensures the smooth bidirectional ? ow of information. The AUV “Cuttle? sh” has two deep-sea gripping systems attached to its ventral side that allow it to manipulate objects underwater. In doing so, thanks to its special design and AI-based control, it is possible to change the center of gravity and buoyancy during a dive and to adopt and maintain any orientation in a stable man- structures such as cloud systems. ROSEN Group devel- ner. In addition to fully autonomous operations, the vehicle oped four measurement technologies for AUVs to check can be operated in a hybrid mode – so-called supervised the condition of various subsea structures: Magnetic ? eld autonomy – using a ? ber optic cable. sensors to detect ferromagnetic structures, sensors to mea-
WITTENSTEIN cyber motor GmbH developed and sure electric ? elds of cathodic protection systems, and ul- produced the thruster drives, with a thrust of up to 500 trasonic and eddy current sensors to measure local wall newtons and suited for water depths up to 6000m. SAP thicknesses using manipulators on the AUV. In addition, a investigated how and under what conditions autonomous communication buoy was developed to ensure data trans- systems such as AUVs can be integrated into IT infra- mission from the robot through the water column. www.marinetechnologynews.com 25
MTR #7 (18-33).indd 25 9/29/2022 6:27:29 PM