Page 46: of Maritime Reporter Magazine (March 2018)
Annual World Yearbook
Read this page in Pdf, Flash or Html5 edition of March 2018 Maritime Reporter Magazine
 45
45
 47
47
Practical Contributions to the Development of
Autonomous Sailing
A great deal of debate and speculation Joint Industry Project. Within ‘Autono- supposed to. A control system is used to When performing docking simula- surrounds autonomous sailing. While mous Sailing’ we will look together into keep a vessel in position, or on track in tions to study the safety of harbour ap-
MARIN does not pretend to know all the the available technology required. Here varying conditions, and should make op- proaches, the simulation model needs to answers, it is taking practical steps to as- we outline the various roles control and timal use of all its available resources, include a decision algorithm that realisti- sist in its development. vessel modelling play in the develop- such as the installed generator power, cally allocates and controls the harbour
The introduction of further autonomy ment of autonomous sailing. thruster characteristics and others. If this tugs that assist the vessel as it enters the in shipping ? rst aims to facilitate much is not done correctly it will result in a harbour and docks along the quayside. higher safety standards, but at the same Control vessel design with a (much) lower op- Similar challenges apply when simulat- time, a reduction in manning. MARIN is Without heading, position and track erational capability than predicted. ing marine traf? c when evaluating traf? c focusing on three main areas in relation control, sea keeping and maneuver- There is a parallel hierarchy between separation scheme designs. These should to autonomous sailing. We believe it is ing model tests would not be possible. autonomy and control. Control is an incorporate some sort of ‘operator in the important to study the ship in relation Conclusions and predictions about the inevitable basis for the higher levels of loop’ model to be able to include the to traf? c control, to understand nautical performance of the whole system in- autonomy: no control, no autonomy. The long-term mission planning and to avoid safety issues and the de? nition of new evitably include the performance of the lowest level of autonomy corresponds to high-risk collision situations. manning roles, including those onshore. controlled system. The best control pos- manual control by a human operator. A
Additionally, in an effort to fur- sible is therefore essential for MARIN. system complying with the highest au- Models ther research into autonomous sailing, The performance of the control system tonomy level will make its own plan, MARIN’s time simulation models will
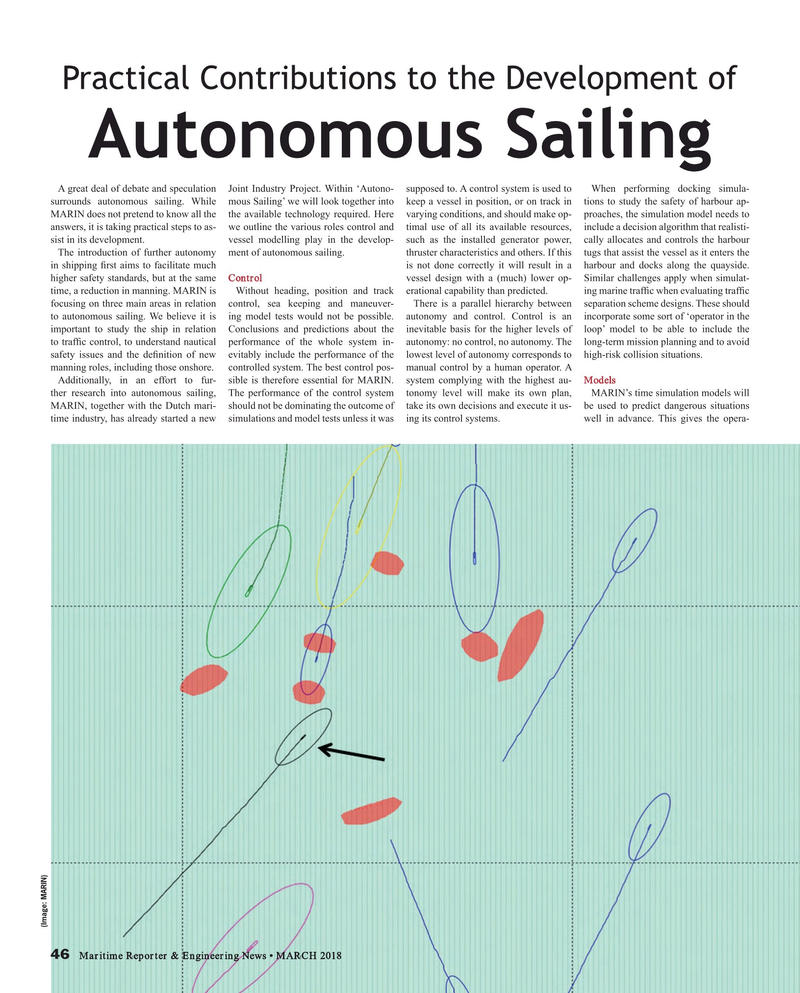
MARIN, together with the Dutch mari- should not be dominating the outcome of take its own decisions and execute it us- be used to predict dangerous situations time industry, has already started a new simulations and model tests unless it was ing its control systems. well in advance. This gives the opera- (Image: MARIN) 46 Maritime Reporter & Engineering News • MARCH 2018
MR #3 (42-49).indd 46 MR #3 (42-49).indd 46 3/8/2018 2:05:31 PM3/8/2018 2:05:31 PM