
Page 42: of Marine Technology Magazine (November 2019)
MTR White Papers: Subsea Vehicles
Read this page in Pdf, Flash or Html5 edition of November 2019 Marine Technology Magazine
 41
41
 43
43
Remote Sensing Riverine Exploration for the ? ight team because they needed grated 29MPixel Prosilica GT6600 digi- for topographic surfaces, and at least 2 to collect three disparate types of data tal camera, and an ITRES CASI 1500H pulses/m2 for bathymetric surfaces. The within the same timeframe. hyperspectral imagery sensor provided natural color imagery was co-acquired
The deployment required out? tting by USGS. The project was among the with the lidar at 10 cm GSD, and the hy- and installing the hyperspectral sensor ? rst riverine area of interest to test the perspectral imagery was collected at 50 with the topo-bathy lidar (and camera) then new 1.5 Secchi Depth Riegl VQ- cm pixel resolution. sensor into a single two-hole aircraft. 880-G system settings and performance With sensors installed on the aircraft,
To create this single airborne platform, for modeling Paci? c Northwest rivers. QSI then had to evaluate and optimize
QSI relied on the Riegl VQ-880-G topo- The lidar sensor was set to collect data ? ight plans for the altitude, ? eld of view bathymetric lidar sensor with an inte- at QL1 pulse density of 8 pulses/m2 and swath width required to meet speci-
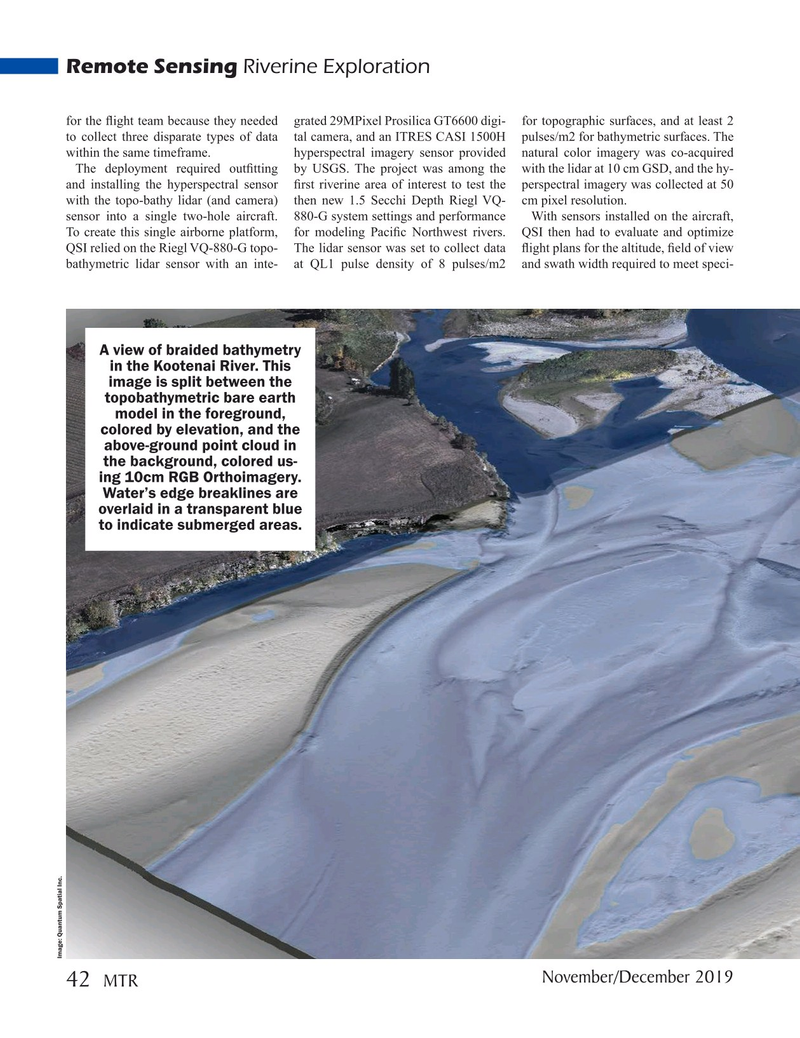
A view of braided bathymetry in the Kootenai River. This image is split between the topobathymetric bare earth model in the foreground, colored by elevation, and the above-ground point cloud in the background, colored us- ing 10cm RGB Orthoimagery.
Water’s edge breaklines are overlaid in a transparent blue to indicate submerged areas.
Image: Quantum Spatial Inc.
November/December 2019 42
MTR
MTR #9 (34-49).indd 42 12/2/2019 11:27:24 AM