
Good Undersea Vehicles Come in Small Packages
The holiday season has just passed, and many may have heard the phrase, “good things come in small packages.” Does this hold true for today’s undersea vehicles? Indeed it does. One of the most striking recent trends in the field is the proliferation of compact and affordable, yet highly effective, undersea vehicles. The past decade has seen new remotely operated vehicles (ROVs) and autonomous underwater vehicles (AUVs) produced that are easily carried and deployed by one person. Capitalizing on developments in circuitry, sensors, and batteries inspired by the consumer electronics sector, these small vehicles punch above their weight class in practical applications.
There are many examples of both ROV and AUV one could consider, but a selection of four are worth reviewing as exemplars of the category. They also offer contrasting perspectives on some key technical and operational choices. For ROVs the Sofar Ocean Trident represents perhaps the pinnacle of compact performance and design optimization. While the Blue Robotics aptly named BlueROV presents a more flexible option. In AUVs the highly engineered “classic” approach is demonstrated by BAE Systems Riptide micro vehicle, albeit with a very flexible software outlook. A new entrant from Queensland University of Technology, the RangerBot, presents a novel paradigm change to keep costs down for specific use cases.
Starting with the ROVs, the BlueROV from Blue Robotics presents a typical ROV form factor. Designed just as a larger work or research ROV would be, the vehicle has an open frame carrying the electronics and battery enclosures, thrusters, buoyancy foam, and ballast weights. This simple design is robust, expandable, and entirely familiar to the field. The system offers six- and eight-thruster configurations, many optional accessories, and significant performance and flexibility. But the novel approach to cost reduction and management of complexity make this a game changer.
To keep costs down the BlueROV is shipped partially assembled, requiring an estimated six to twelve hours of user assembly to complete. While this is a cost savings for the buyer it also provides customers the chance to understand the components and the system architecture. This supports a tool intended for end user modifications and upgrades. The vehicle leverages common drone technologies and employs the open-source ArduSub control firmware, this offers both useful features and an extensive user community. The operator controls the ROV with a laptop computer and game controller. The open-source QGroundControl application provides the user interface. This potent combination of technology is offered at a remarkably low entry price of $3,500. This brings a truly capable ROV to a significant new audience.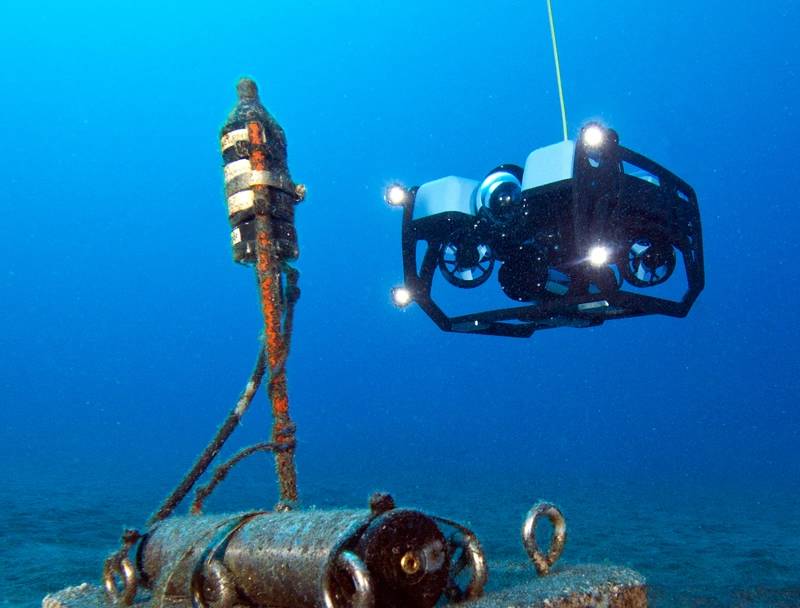 A BlueROV (Credit Blue Robotics, Jeff Milisen)Also expanding the audience for ROVs is the Trident from Sofar Ocean, formerly OpenROV. This compact ROV is a case study in engineering optimization. Its form factor and architecture are a significant evolution from other battery powered ROVs. Trident has a unique design that combines the versatility and control of an ROV (Remotely Operated Vehicle) and the efficiency of an AUV (Autonomous Underwater Vehicle). It can perform extended linear transects and complex maneuvers in tight spaces. Using only three thrusters, in a unique offset configuration, the ROV can move forward efficiently but maneuver very delicately. The off-center vertical thruster of the ROV can cause it to pitch at high speeds but also hover or change depth without pitching while operating at low speeds—similar to the way a traditional ROV works.In addition to an elegant hydrodynamic design Trident was designed to be highly portable and quite durable. The ROV is small enough to fit in a backpack while its side panels are molded with a rubber coating giving it a form of bumpers. The user interface is based on internet standards such as HTML5 and WebGL to enable piloting through just a browser that runs on laptops, tablets, and mobile devices. The embrace of modern software open source approaches ensures that the code base can be continually updated by both the community and the company. This allows user driven software changes such as new user interfaces to shape the operating experience and delivery of improved ROV capabilities to the global Trident community.
A BlueROV (Credit Blue Robotics, Jeff Milisen)Also expanding the audience for ROVs is the Trident from Sofar Ocean, formerly OpenROV. This compact ROV is a case study in engineering optimization. Its form factor and architecture are a significant evolution from other battery powered ROVs. Trident has a unique design that combines the versatility and control of an ROV (Remotely Operated Vehicle) and the efficiency of an AUV (Autonomous Underwater Vehicle). It can perform extended linear transects and complex maneuvers in tight spaces. Using only three thrusters, in a unique offset configuration, the ROV can move forward efficiently but maneuver very delicately. The off-center vertical thruster of the ROV can cause it to pitch at high speeds but also hover or change depth without pitching while operating at low speeds—similar to the way a traditional ROV works.In addition to an elegant hydrodynamic design Trident was designed to be highly portable and quite durable. The ROV is small enough to fit in a backpack while its side panels are molded with a rubber coating giving it a form of bumpers. The user interface is based on internet standards such as HTML5 and WebGL to enable piloting through just a browser that runs on laptops, tablets, and mobile devices. The embrace of modern software open source approaches ensures that the code base can be continually updated by both the community and the company. This allows user driven software changes such as new user interfaces to shape the operating experience and delivery of improved ROV capabilities to the global Trident community.
This easy to use, high performance package is available on Amazon staring at $1,700. It is truly a new era for accessible, and useful, ocean robots. Those looking for a tethered experience can select a highly optimized system or a modular approach with more end-user configurability. In either case, for the cost of a modern laptop or PC one can be fully equipped to engage meaningful missions in water depths up to 100 meters. Those willing to “cut the cord” have additional options.
Effective AUVs have become smaller, and more affordable, in recent years. As with their ROV cousins there are multiple examples to consider. The modern “micro” AUV is perhaps best associated with the products of BAE Systems, formerly Riptide Autonomous Solutions. Riptide is a story of small vehicles and rapid growth. Founded in 2015 Riptide quickly delivered a compact AUV offering.
Riptide’s first product was the micro-UUV, a highly flexible, open source autonomous undersea vehicle that provided a state-of-the-art, low cost solution well suited for developers of autonomy and behaviors, subsea sensors, and other new payloads. The micro-UUV featured open hardware and software interfaces giving users a reliable and robust platform to advance technology development. The vehicle design was optimized for high efficiency with the best hydrodynamic signature in its class. The base micro-UUV is 4 7/8 inches in diameter, 40 inches in length, and weighs 22 lbs. The standard system is rated to a depth of 300 meters.
While this vehicle may look like a “typical” industry offering it is differentiated by more than its small size. The focus on end-user needs was most prevalent in the software design. In contrast to typical proprietary architectures, the micro-UUV featured a flexible architecture leveraging a large amount of open source software. In the initial release of micro-UUV software, Riptide offered code for the Arduino and Beaglebone Black development platforms, as well as support for the MOOS-IvP robot control engine. This was a powerful feature set for any AUV. At a starting price around $15,000 there was significant market interest.
By 2019 the success of this product was noted by BAE Systems. The BAE Systems FAST Labs organization acquired Riptide and is now maturing the platform technology and scaling manufacturing. FAST Labs is the R&D arm of BAE Systems, Inc. and is unique in the
defense industry as an in-house, customer-funded R&D business designed to
collaborate across the company’s global enterprise to develop and transition advanced technologies. The micro AUV originally launched by Riptide is benefitting from this process.
Another small AUV that has recently come on scene is the RangerBot. This vehicle takes a different approach to delivering an affordable solution for end users. The RangerBot was designed by engineers at Queensland University of Technology (QUT) in Brisbane, Australia. The team at QUT work in a robotics center focused on machine vision. They also work to support environmental assessments on the Great Barrier Reef. A key paradigm shift was enabled when the team, recognizing that water conditions in their target environment were very clear, chose to employ exclusively vision-based sensing. RangerBot over a reef (Credit Matthew Dunbabin/QUT) This perhaps sounds obvious but abandoning the size, power and, most notably, cost penalties of acoustic instruments, RangerBot became smaller, easier to use, and more affordable than typical alternatives. Using a series of cameras, the RangerBot can manage its horizontal course over the bottom as well as its depth. Using the latest photo mosaic tools, the vehicle can also produce useful data products over a survey site. The visual systems also allow for complex environmental management applications.RangerBot, and its predecessor prototypes, has proved able to identify crown of thorns starfish (COTS), a predator that can ravage coral reefs. The AUVs have also demonstrated the ability to carry a payload that can eliminate the COTS through precise injection of a solution that only harms the invasive organism. The payload interface that supports this mission is also helping with reef restoration. A bladder of up to 8 liters of coral larvae can be installed on the RangerBot. Using its automated vision capabilities, the AUV can identify proper bare spaces on a degraded reef and deposit the appropriate concentration of larvae. Thus, a fully loaded RangerBot can seed approximately 250 square meters of reef. This is more efficient than previous diver-based techniques.
RangerBot over a reef (Credit Matthew Dunbabin/QUT) This perhaps sounds obvious but abandoning the size, power and, most notably, cost penalties of acoustic instruments, RangerBot became smaller, easier to use, and more affordable than typical alternatives. Using a series of cameras, the RangerBot can manage its horizontal course over the bottom as well as its depth. Using the latest photo mosaic tools, the vehicle can also produce useful data products over a survey site. The visual systems also allow for complex environmental management applications.RangerBot, and its predecessor prototypes, has proved able to identify crown of thorns starfish (COTS), a predator that can ravage coral reefs. The AUVs have also demonstrated the ability to carry a payload that can eliminate the COTS through precise injection of a solution that only harms the invasive organism. The payload interface that supports this mission is also helping with reef restoration. A bladder of up to 8 liters of coral larvae can be installed on the RangerBot. Using its automated vision capabilities, the AUV can identify proper bare spaces on a degraded reef and deposit the appropriate concentration of larvae. Thus, a fully loaded RangerBot can seed approximately 250 square meters of reef. This is more efficient than previous diver-based techniques.
Inspired by these successful research efforts the team at QUT have optimized the RangerBot design for production and are preparing to support a commercialization effort. When this product variant comes to market it will offer a powerful solution combining AUV free-swimming efficiency with ROV levels of maneuverability as well as advanced survey and inspection capabilities. The caveat here is that water clarity must be sufficiently high for the visual technology to work. But there are many such operating environments in the global ocean.
The examples presented here are offered to validate the statement that “good undersea vehicles come in small packages.” ROV and AUV users can find many choices, including beyond the systems discussed here. The trends underlying these developments include a greater adoption of open source software, modern production tools, and cost benefits from other fields, notably consumer electronics. The impact of innovative thinking and clean sheet design is also notable. The vehicles profiled here, and many other compact offerings in the field, benefit from the thinking of individuals, or organizations, that are new to the sector. Breaking free of older technologies, or design concepts, appears to be a big idea enabling the smaller undersea vehicle community.
Read Good Undersea Vehicles Come in Small Packages in Pdf, Flash or Html5 edition of January 2020 Marine Technology
Other stories from January 2020 issue
Content
- Ocean Energy: A Surge Coming in 2020 page: 14
- Exploring Under The ice (& Keeping your AUV in one piece) page: 26
- Hybrid Autonomous Systems Evolve page: 30
- Marine Autonomy Above & Below the Water page: 30
- Good Undersea Vehicles Come in Small Packages page: 34
- Measuring the Hostile Ocean Beneath Hurricanes page: 40
- Subsea Robots in the Splash Zone page: 46
- UUV Manipulators: Get a Grip page: 52