Auvs
-
- A SmallSat AUV Network Marine Technology, Feb 2019 #54
There’s more to a global network than satellite links, and yet sat-linked remote operations experts can heap huge scientific and technological gains on the world. That’s what’s happening in the background — a smallish network of the best scientists from around the world are orchestrating the communications and robotics that’ll yield groundbreaking achievement in the networked use of autonomous underwater vehicles, or AUVs.
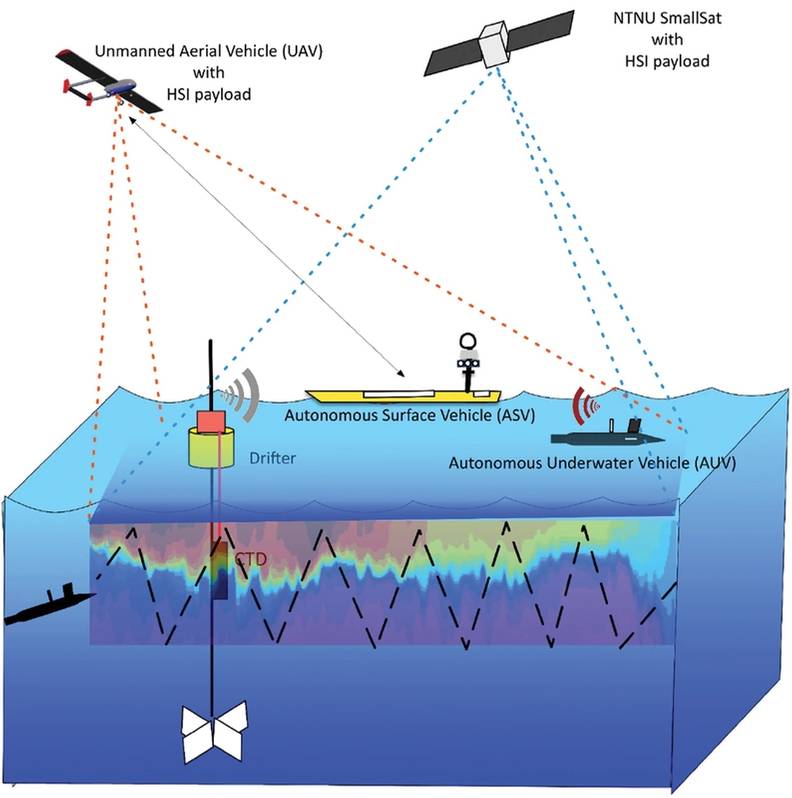
If you contact Professor Kanna Rajan, as we did, he’ll tell you he’s not the world’s foremost “drone” researcher, yet he’s programmed at least two Mars missions and advises a transatlantic network of scientists on the use of AUVs and satellites. Prof. Rajan suggests AUV-network control guru, Professor João Tasso De Figueiredo Borges De Sousa of the University of Porto, is the go-to guy if you’re contemplating what’s possible in the world of AUVs. Dr. Rajan is affiliated with Porto in Portugal, and he’s quoted at length (about 50 times) in a vision statement written by the Norwegian university NTNU on their planned use of small satellites, or SmallSats, to control AUVs. NTNU post-docs, Ph.Ds and masters students are nearing their SmallSat launch day, after which North Sea AUVs will have taken a step toward being able to relay data to scientists onshore for long periods. Both SmallSats and AUVs will have hyperspectral cameras able to detect chemicals, metals, plankton or do survey work.
The California-based Prof. Rajan is a senior scientist known for planning, executing and creating autonomous systems and robotics at NASA’s Ames Research Center. Prof. De Sousa leads an international network of AUV-keen scientists akin to NTNU’s. Both have highly evolved AUV labs. The three research communities have combined to make lasting AUV operations controlled or augmented by Micro or Nano satellites — SmallSats of 10-100 kilograms or 1-10 kg — a reality. Apart from the command and control of networked AUVS (and other drones) en masse, which is Prof. De Sousa’s specialty, it is hoped that SmallSats will do for ocean understanding and marine operations what the Internet did for marketing and instant knowledge.
AUV control
“Most of our work is joint, and strategically we all (NTNU, Porto, NASA) are moving in the same direction,” Dr. Rajan says, adding, “So this is both institutional and collective.” Rajan admits switching from Mars rovers to “piloting” AUVs at sea was harder than expected. “The infrastructure came with the tasks associated with commanding the Rover in 2004 and the Deep Space 1 spacecraft in 1999. But the nitty gritty of getting to a coastal zone on a reasonable vessel in weather that can be harsh and not trivial to work with, is something most people don’t understand … So yes, both the Rover and an AUV are an extension of the human senses per se, but there’s a lot more work involved in getting to sea and making things work.”That’s why Prof. Rajan, Prof. De Sousa (who we failed to contact) and their NTNU colleagues are so looking forward to launching SmallSats: detailed, long-standing ocean examinations. That focus will revolutionize ocean research. In the networks of this heavyweight science network, the limitations of AUVs are acutely known, and researchers from Hawaii to Hong Kong will attest, that it is harder to communicate with AUVs than it is with space probes and their “infrastructure of Deep Space Network for spacecraft.” While “power is an important shortcoming”, too, it’s the communications problem that keeps this triad of researchers awake at nights.
 AUV networker: Professor Joao Tasso de Sousa aboard the Schmidt Ocean Institute vessel, Falkor. Photo: Schmidt Ocean Institute
AUV networker: Professor Joao Tasso de Sousa aboard the Schmidt Ocean Institute vessel, Falkor. Photo: Schmidt Ocean InstitutePortuguese explorer
Rajan is right about Prof. Tasso: “The superpower in AUVs and marine robotics is our close friend and collaborator, Joao Tasso (De Sousa).”
In fact, Portugal is a powerhouse of AUV development and research. Apart from hosting the biennial IEEE OES Autonomous Underwater Vehicle Symposium, the country boasts both Tasso’s Underwater Systems & Technology Laboratory, or LSTS, and the researchers of INESCTEC. Prof. De Sousa recently led a Schmidt Ocean Institute expedition aboard their Falkor research vessel that explored ocean salinity fronts using multiple areal and underwater robots. He’s also been known to lecture NATO navies on combined AUV operations.De Sousa is a pioneer of and continues to work on the managing of multiple autonomous vehicles simultaneously. He has helped develop commercial and researcher software which incorporates mobile devices for easy control of networked AUVs. While applications might one day include mass ocean surveillance, mass inspection, mass survey or massive attack, the oceanic study involved AUVs (and aerial drones) in contact with each other via a ship-based ocean controller. SmallSats could provide these expeditions with the researchers own’ dedicated bandwidth (understood to only be NTNU, for now).
Networking AUVs need open-source control software like that developed by the U. of Porto’s LSTS. Several AUVs communicating via their own satellite can, with their onboard sniffing payloads, relay in real-time an accurate picture of the dramatic changes developing across a vast ocean area: or they can confirm by sensing, sampling or photographing what the SmallSats sense or see. The Schmidt Institute chronicled Prof. De Sousa teams deploying “several autonomous vehicles to find, track, and sample various physical, chemical, and biological features of the ocean, on time-space scales not previously possible by ship or aircraft studies alone”. Given their own spectral cameras, the SmallSats would then add another layer of real-time data.
During the Schmidt journey, “onboard AI,” Rajan’s shared area of interest with Prof. De Sousa, was used to coordinate AUVs, unmanned aerial vehicles and autonomous surface vessels doing “complex sampling tasks”. Multiple vehicles “at times” were said to have worked in “combined effort”, monitored and controlled by software dubbed Ripples and Neptus. To do that over the long haul, you need dedicated bandwidth for the expected torrent of ocean data. To get that, your AUVs need their own SmallSats in space.
 Adding depth: the full range of ocean views. Illustrations courtesy Professor Kanna Rajan
Adding depth: the full range of ocean views. Illustrations courtesy Professor Kanna RajanNASA-quality supervisor
Enter the Norwegians. Funding that’s hard to fathom, for some, and experience storing and processing vast volumes of data (like the results of seismic surveys) are part of Norway’s contribution to AUV and AUV-based research.Add to that a growing SmallSat faculty, two AIS satellites and a handful of “space” outfits, including some with military ties. While the researcher haul of all three “schools” — Porto, NASA and NTNU — is large and international, it’s the Norwegians and their invited talent that’ll provide the SmallSats triad’s space-side boost. There’s also NTNU students with satellite launch experience, and then there’s the supervision of Prof. Rajan with his combined space and robotics experience. Rajan is listed as an NTNU employee, a NASA employee and an associate of the U. of Porto. He executed NASA’s 1999 New Millennium Deep Space One Remote Agent Experiment (RAX) and was principal investigator of the 2003 Mars Exploration Rovers MAPGEN controller for the twin rovers — “the longest running AI system anywhere and still in-command of the Opportunity rover on Mars”, according to an NTNU text. He was also principal researcher for autonomy at the Monterey Aquarium Research Institute, where he designed, built and deployed the AI-based embedded T-REX autonomous controller on AUVs, as well as a shore-based support system!
Cost-efficient comms
While the Norwegian AUV lab at NTNU is poised to log the great achievement of a SmallSat launch at sea, the funding of the Norwegians cannot be overstated. The finance outmatches EU funds, and it does for AUV and oceanographic research in Norway what the Schmidt Institute did for Porto’s ocean fronts study and the work of other oceanographic researchers.
“Funding is a serious issue in doing marine robotics and/or ocean science,” Prof. Rajan writes. “In the US, we have multiple agencies and stakeholders who believe they need to do something about the ocean. This includes NSF, NOAA, DARPA, ONR all of whom have interests which intersect and compete. In Norway, this is less so, but (the Research Council Norway) has done a good job in streamlining the funding process. Not so in the US. Contrast this with going to space — there is really one entry point. And that is NASA. So the process of sending up a spacecraft is a lot better understood, clearer and more reasonable (via the US National Academies) than going to sea, quite often.”
Prof. Rajan says space agencies also tend to engineer the hell out of their vehicles while spending “enormous sums of money” on duplication and robustness. That’s not quite the Norwegian SmallSats approach. In their SmallSats whitepaper, NTNU acknowledges a need to focus on small dedicated satellites with cameras and coms rather than asking for periodic bandwidth on a more robust but costly commercial satellite. However giving to research, NTNU knows that the state’s finance isn’t always forthcoming. So, they’ve focused on a SmallSat program that’ll cost between USD 100,000 and USD 7 million.
Cash is king, even for this network of giants. However, AUVs make ocean research of scale affordable. In a mission brief for the Schmidt Ocean Institute, Prof. Joao Borges de Sousa wrote the following: “We need to develop sustained ocean studies with unprecedented spatial and temporal resolution. Ships alone cannot help to achieve these levels of resolution, scale, and economic feasibility.” He might already have been thinking “SmallSats”, and NASA’s Prof. Rajan is affiliated with both NTNU’s Center for Autonomous Marine Operations and Systems (AMOS) and Porto’s Underwater Systems and Technology Laboratory.
Sometime between this spring and 2020, a Norwegian launcher will send up a SmallSat, and then there use is expected to expand in tandem withthe proliferation of AUVs. A Norwegian Space Centre already supervises satellite launches in Norway, including those by Norwegian students who design their own micro satellites (under 1 kg). NTNU’s stated vision is to be a SmallSats leader, starting with the hyperspectral camera they built using off-the-shelf parts and parts they 3D-printed themselves.
Apart from NTNU, Norway’s near-arctic, island Space Centre is getting ready to expand its SmallSat launch program. Defence outfit, Norske Nammo, is reportedly readying an eco-friendly micro-rocket to carry SmallSats into pre-defined orbits. Aerial and underwater: a range of AUVs and aerial drones were networked during a Schmidt Ocean Institute survey of ocean fronts. Photo: Schmidt Ocean Institute
Aerial and underwater: a range of AUVs and aerial drones were networked during a Schmidt Ocean Institute survey of ocean fronts. Photo: Schmidt Ocean Institute -
- Unmanned Vehicles: 25 Years of Milestones Marine Technology, Jan 2019 #26
(AUV) Lab which spawned numerous vehicles, launched an industry leader, and trained many engineers now shaping the field around the world.The evolution of AUVs, sometimes known as UUVs, and autonomous surface vehicles (ASVs), sometimes known and USVs, illustrates both technical and commercial influences. As
-
- A Pivotal Year for AUVs in the Oil & Gas Sector Marine Technology, May 2014 #24
AUVs are on their way. With vast scope for their application, autonomous underwater vehicles are finally gaining pace in the commercial sector. The technology, which has its origins in military activities such as mine counter-measure and rapid environmental assessment (MC & REA), also has a strong presence
-
- MTR100: Hydroid Inc. Marine Technology, Aug 2015 #73
. of Employees: 148 Part of Kongsberg Maritime’s AUV Group, Hydroid is the world’s most trusted manufacturer of advanced Autonomous Underwater Vehicles (AUVs). REMUS AUVs provide innovative and reliable full-picture systems for the marine research, defense, hydrographic and commercial offshore/energy markets
-
- Autonomy Takes Off Underwater Marine Technology, Jan 2015 #14
AUV sector, MTR reached out to several leading executives, including: Rear Admiral Fred Byus, USN (Ret.), Battelle; Richard Mills, Product Sales Manager for AUVs, Kongsberg Maritime AS; Stefan Reynisson, General Manager, Teledyne Gavia, and Graham Lester, VP Sales & Marketing, Hydroid Inc. for their insights
-
- The “Disruption” in AUV Trends Marine Technology, Jan 2019 #42
bearing spectral cameras that will also gather and beam back the data gathered by the spectral cameras and sensors of their REMUS-dominated fleet of AUVs. The pocket satellites will instantly process and send to shore data on the contours and algal life above and below arctic ice. The satellites will
-
- MTR 100: Hydroid Marine Technology, Jul 2014 #88
Part of Kongsberg Maritime’s AUV Group, Hydroid is a trusted manufacturer of advanced Autonomous Underwater Vehicles (AUVs). REMUS AUVs provide innovative and reliable full-picture systems for the marine research, defense, hydrographic and commercial offshore/energy markets. REMUS vehicles are advanced
-
- A New Era of Antarctic Exploration: AUVs in Polar Science Marine Technology, Jan 2015 #26
is more accessible than ever. The last several years have seen advancements in polar technology and the introduction of autonomous underwater vehicles (AUVs), making previously inaccessible areas open to scientific investigation and hailing the start of a new era for Antarctic exploration. The Antarctic
-
- AUVs: Getting Defensive Marine Technology, May 2015 #28
has been relatively steady. What are your offerings to the defense sectors? Within Kongsberg Maritime we have two groups that deliver cruising AUVs to defense customers. The HUGIN AUV System from Kongsberg Maritime has been adopted by navies across Europe and also as far as India. Hydroid, a Kongsberg
-
- AUVs are Central to Lisbon Security Program Marine Technology, Jun 2014 #18
Two Autonomous Underwater Vehicles (AUVs), specifically developed for the SUPPORT (Security UPgrade for PORTS) project, an integrated four-year research and development project, partially funded by the European Commission’s FP7 Security Research Program, were demonstrated at the Port of Lisbon on May 22.
-
- EdgeTech System for Polish Defense AUVs Marine Technology, Apr 2014 #59
AUV systems have embraced the high quality sonars which were traditionally only available in larger sized AUV systems. The recently delivered Teledyne Gavia AUVs to the Polish Ministry of Defense for mine countermeasure’s (MCM) were equipped with the latest EdgeTech 600/1,600 kHz simultaneous dual frequency side
-
- Exploring Alien Oceans with AUVs Marine Technology, Oct 2016 #22
in the design, along with highly-specialized sensors needed for the exploration of an under-ice foreign environment. Typical under-ice-exploration AUVs used on Earth are significantly bigger. “If I had to select one single biggest challenge of this project it would be complexity. When starting the
-
 )
May/Jun 2026 - Marine Technology Reporter page: 44
)
May/Jun 2026 - Marine Technology Reporter page: 44Lakes. The vessel and its crew of ¯ Sonardyne Navigation Selected by Njord Survey for NOAA Corps of? cers and professional mariners are working ecoSUB AUVs with NOAA scientists to map the waters of western and cen- Swedish innovator Njord Survey has chosen Sonardyne navi- tral Lake Erie and eastern Lake
-
 )
June 2026 - Maritime Reporter and Engineering News page: 31
)
June 2026 - Maritime Reporter and Engineering News page: 31recently released SeaGuard, a non-ki- port in Mississippi last year. The vehicle does a full scan of the netic underwater defeat system that repels hostile AUVs and de- port twice a week using a variety of subsea payloads including ters divers. When coupled with ThayerMahan’s TransparenSea, bathymetry, side-scan
-
 )
June 2026 - Maritime Reporter and Engineering News page: 30
)
June 2026 - Maritime Reporter and Engineering News page: 30is transforming the ? eld. Open Ocean Robotics ThayerMahan recently released SeaGuard™, a non- kinetic underwater defeat system that repels hostile AUVs and deters divers. ThayerMahan 30 Maritime Reporter & Engineering News • June 2026 MR #6 (18-33).indd 30 MR #6 (18-33).indd 30 5/28/2026 10:18:57
-
 )
Mar/Apr 2026 - Marine Technology Reporter page: 25
)
Mar/Apr 2026 - Marine Technology Reporter page: 25. En- suring the channel and harbor are clear Box? sh Robotics AUV for ship traf? c is critical to the rapid re- being deployed. opening of a port. AUVs from Box? sh Robotics are pro- viding change detection in a different context – environmental rehabilitation Box? sh Robotics within port waters
-
 )
Mar/Apr 2026 - Marine Technology Reporter page: 10
)
Mar/Apr 2026 - Marine Technology Reporter page: 10perimeter. The Forcys Sentinel IDS integrates acoustic countermeasures to disrupt malicious UUVs. Bubble passive sonar as well, and can detect divers, AUVs, or SDVs curtains, for example - commonly used in offshore construc- at ranges of up to 1.5 kilometers. tion to dampen sound emissions - create dense
-
 )
Jan/Feb 2026 - Marine Technology Reporter page: 53
)
Jan/Feb 2026 - Marine Technology Reporter page: 53into a company building autonomous underwa- tos Basin Viridien has successfully completed fully integrated software prototype. This ter vehicles (AUVs) for the US military, the BM-S-2 seismic reimaging project work will introduce automated classi? - allied nations, and commercial custom- in the
-
 )
Jan/Feb 2026 - Marine Technology Reporter page: 51
)
Jan/Feb 2026 - Marine Technology Reporter page: 51presence of currents, ve- extend far beyond the individual vehicle. The availability of hicle stability, and the reliability of power connections and data AUVs capable of autonomously returning to a subsea station ? ows, providing a solid technological and operational founda- enables the deployment of persistent
-
 )
Jan/Feb 2026 - Marine Technology Reporter page: 50
)
Jan/Feb 2026 - Marine Technology Reporter page: 50constitute key infrastructural nodes rect human intervention. Autonomous Underwater within advanced marine observation systems, allowing a re- FVehicles (AUVs), while capable of carrying out duction in dependence on surface operations and an increase pre-programmed missions along the water column or on the
-
 )
Jan/Feb 2026 - Marine Technology Reporter page: 41
)
Jan/Feb 2026 - Marine Technology Reporter page: 41points Aperture Sonar (SAS) for also an option for certain specialized can be collected, processed and vi- high-resolution imaging missions. ecoSUB's AUVs are also sualized. In offshore, exploration and of buried objects. standard ? t with rechargeable Li-ION defense applications, autonomous ? Unmatched
-
 )
Jan/Feb 2026 - Marine Technology Reporter page: 38
)
Jan/Feb 2026 - Marine Technology Reporter page: 38to keep pace Engine.” The SoAR ? eet consisted of ecoSUB's Autonomous with global trends, several de? ning themes emerge amongst Underwater Vehicles (AUVs), the National Oceanography Cen- leading vehicle companies—multi-use, usability, visibility, tre's Auto-Hover 1 hover-capable platform, and Sonardyne’s
-
 )
Sep/Oct 2025 - Marine Technology Reporter page: 64
)
Sep/Oct 2025 - Marine Technology Reporter page: 64multibeam and single beam sonars, ADCPs, acous- Sonardyne is a leader in the development of underwater tic modems, underwater cameras and lights, AUVs, gliders, technology, consistently delivering innovations that rede- and seismic systems. Their products are used for object detec-
-
 )
Sep/Oct 2025 - Marine Technology Reporter page: 38
)
Sep/Oct 2025 - Marine Technology Reporter page: 38Australia and New Zealand MTR 100 Hydrus AUVs Source: Advanced Navigation and depth sensing cameras, and its own processing system that we designed and worked in collaboration with the team at Indiana University to create. It’s still being used for research purposes to this day in the US.” The company
-
 )
Sep/Oct 2025 - Marine Technology Reporter page: 22
)
Sep/Oct 2025 - Marine Technology Reporter page: 22cutting, salvage port Workshop – for building, servicing, MSC ? eet replenishment oiler USNS diving; subsea demolition; heavy equip- and testing ROVs and AUVs. Kanawha (T-AO 196). ment and rigging operations; surface- • R&D Department – focused on pres- In February 2025, Detyens was award- supplied mixed gas sure-r
-
 )
Sep/Oct 2025 - Marine Technology Reporter page: 13
)
Sep/Oct 2025 - Marine Technology Reporter page: 13and Compatt 6+ LBL systems can double as communications uniting leading subsea brands under one umbrella to leverage networks, enabling AUVs, ROVs, and divers to share naviga- centralized R&D, engineering, and market support. Four of its tion data and mission updates. EvoLogics pushes acoustic companies
-
 )
Sep/Oct 2025 - Marine Technology Reporter page: 12
)
Sep/Oct 2025 - Marine Technology Reporter page: 12Robotics is democratizing subsea autonomy with its derwater communication is equally as critical as navigation family of lightweight, affordable AUVs that can be deployed and sensing, and MTR100 companies are pioneering solutions in large numbers. Their portability and ease of use make them that
-
 )
Sep/Oct 2025 - Marine Technology Reporter page: 11
)
Sep/Oct 2025 - Marine Technology Reporter page: 11in contested environments. Nortek’s compact Doppler Veloc- ity Logs (DVLs) and the Nucleus 1000 Ç??˪¯©©¯ª¯ªª?Ç?¯ª navigation system are enabling small AUVs and diver guidance systems to operate autonomously with remarkable accuracy. Paired with SBG Systems’ MEMS-based inertial sensors, these so- lutions
-
 )
September 2025 - Marine News page: 43
)
September 2025 - Marine News page: 43a dedicated Launch and Recovery System (LARS) for safe deployment and retrieval of un- crewed surface vehicles (USVs) and autonomous underwa- ter vehicles (AUVs). Oceaneering • Data Infrastructure Improvements, including Oceaneering said its Subsea Robotics segment has up- computer rack room retro? ts and
-
 )
Jul/Aug 2025 - Marine Technology Reporter page: 42
)
Jul/Aug 2025 - Marine Technology Reporter page: 42also eases operated vehicles (ROVs), design integration by including UART, autonomous underwater vehicles CAN, SPI and I2C interfaces on-board, (AUVs), sensor buoys Key product speci? cations: and supports RS232 and RS422 via the • Mobile robots and autonomous • Typical power consumption: <0
-
 )
Jul/Aug 2025 - Marine Technology Reporter page: 29
)
Jul/Aug 2025 - Marine Technology Reporter page: 29the USV, bringing it aboard the mothership SOLUS is the latest addition to Henriksen’s product range, which also includes launch and recovery systems for AUVs and advanced mine sweeping systems. SOLUS ENABLES CONVENTIONAL LAUNCHING OF ARGEO ARGUS BY CRANE. ? Compact Size: 77 x 33 cm ? Light Weight: 21 or
-
 )
Jul/Aug 2025 - Marine Technology Reporter page: 26
)
Jul/Aug 2025 - Marine Technology Reporter page: 26BEEN SPECIFICALLY DEVELOPED FOR THE 24-METER LONG USV CHALLENGER. Source DeepOcean Source DeepOcean tonomous surface vessel to enable it to recover swarm AUVs. looking sonar and seizes it using specially designed clips. The The system is scalable because the recovery onus is on the LARS can then rewind
-
 )
Jul/Aug 2025 - Marine Technology Reporter page: 25
)
Jul/Aug 2025 - Marine Technology Reporter page: 25ef? ciency, but with swarms, the challenges are ampli? ed. “We have all these bespoke launch and recovery solutions recovering our multi-million-dollar AUVs, but those solutions just don’t scale economically when you’re talking about a variety of dif- ferent vehicles, or swarms,” says Seth McCammon, a scientist
-
 )
Jul/Aug 2025 - Marine Technology Reporter page: 10
)
Jul/Aug 2025 - Marine Technology Reporter page: 10SUBSEA DEFENSE ULTRA-LARGE AUVS could provide a forward-deployed charging station to enable a does/autonomous underwater munitions, loitering munitions/ persistent, wide-area, covert forward undersea presence. The SLUAS launched from encapsulated canisters, or even FPV Navy’s recent successful testing
-
 )
Jul/Aug 2025 - Marine Technology Reporter page: 9
)
Jul/Aug 2025 - Marine Technology Reporter page: 9development of the associated infrastructure shipyard capacity, aging infrastructure, and a shortage of skilled required to support a full squadron of UL-AUVs. ONR is also labor continuing to cause backlogs across all naval platforms. seeking unspeci? ced, innovative UL-AUV-related technolo- Yet, despite
-
 )
Jul/Aug 2025 - Marine Technology Reporter page: 8
)
Jul/Aug 2025 - Marine Technology Reporter page: 8SUBSEA DEFENSE ULTRA-LARGE AUVS 8QG 8QGHUZDWHUVRQDUVHQVLQJ SUR SSSURGXFWVGHSOR\HGLQPLVVLRQ ULW FUU FULWLFDOPDULWLPHV\VWHPV ZLO ZLO ZLOFR[RQFRPPDULQH Credit: Richard Allen/US Navy/NUWCD Newport SUPERSIZE IT: THE U.S. NAVY IS SEEKING AN ULTRA-LARGE AUV By David Strachan, Strikepod Systems Image above: