
Lockheed Martin’s Revolutionary AUV
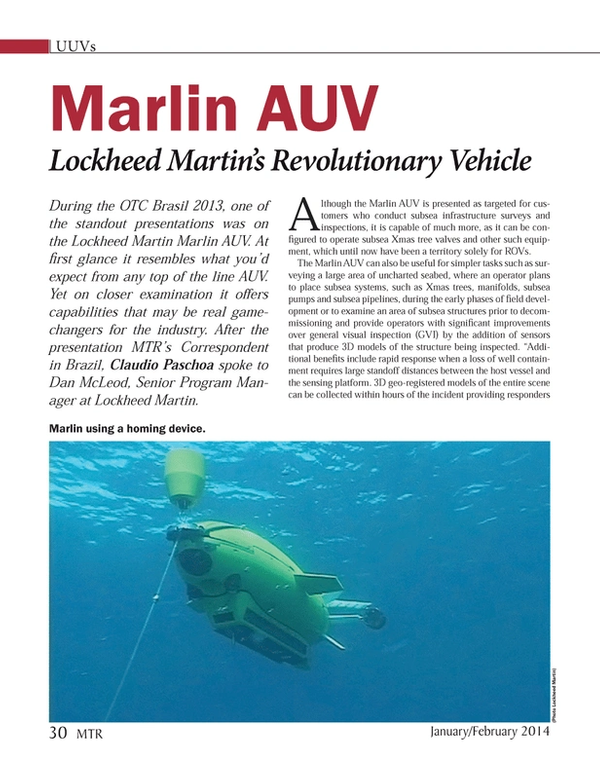
During the OTC Brasil 2013, one of the standout presentations was on the Lockheed Martin Marlin AUV. At first glance it resembles what you’d expect from any top of the line AUV. Yet on closer examination it offers capabilities that may be real game-changers for the industry. After the presentation MTR’s Correspondent in Brazil, Claudio Paschoa spoke to Dan McLeod, Senior Program Manager at Lockheed Martin.
Although the Marlin AUV is presented as targeted for customers who conduct subsea infrastructure surveys and inspections, it is capable of much more, as it can be configured to operate subsea Xmas tree valves and other such equipment, which until now have been a territory solely for ROVs.
The Marlin AUV can also be useful for simpler tasks such as surveying a large area of uncharted seabed, where an operator plans to place subsea systems, such as Xmas trees, manifolds, subsea pumps and subsea pipelines, during the early phases of field development or to examine an area of subsea structures prior to decommissioning and provide operators with significant improvements over general visual inspection (GVI) by the addition of sensors that produce 3D models of the structure being inspected. “Additional benefits include rapid response when a loss of well containment requires large standoff distances between the host vessel and the sensing platform. 3D geo-registered models of the entire scene can be collected within hours of the incident providing responders with a clear vision of the underwater scene along with in-situ status of critical components,” said McLeod.
Lockheed Martin developed and tested the Marlin AUV employing a Coda Octopus Echoscope 3D imaging sonar as the primary inspection sensor. The Echoscope produces a 128 x 128 matrix of receive beams at a rate of 5/second; a high-density return imaged from multiple aspects that results in a 3D image of the desired objects. The Marlin’s software geo-registers each image pixel and constructs a 3D model using advanced image processing techniques. The result is a high-resolution 3D model of the target structure. According to McLeod, “Introduction of new sensors support even more advanced capabilities leading to autonomous metrology, hydrocarbon detection tracking and fingerprinting, non-contact corrosion potential measurement, thermal measurements and 3D underwater scanning lasers.”
The Marlin’s sensor suite can generate accurate, hi-resolution, 3D, geo-referenced models, showing a clear view of subsea structures, including the use of lasers to produce clear images in murky waters. The 10-ft. submersible is highly maneuverable and is able to operate in tight spaces. It can reportedly perform up to four times faster inspections, delivering higher fidelity information in hours versus days. Traditional means of inspecting subsea equipment employ visual sensors such as video or still cameras mounted on ROVs that are controlled through umbilicals from a dedicated vessel on the surface. This requires significant topside support equipment and skilled operators on site to control and maintain the ROV. While the quality of images has improved with the advent of HD sensors, image quality is often degraded by movement of the cameras and the turbidity of the water, potentially reducing the effectiveness of inspections. The final data provided to clients is often composed of many hours of recorded video that must be archived and revisited for detailed examination, which in turn increases the time it takes to make informed decisions.
While workclass ROVs are a standard in the performance of IRM tasks in deepwater, AUV use is starting to make some inroads as more sophisticated units such as the Marlin AUV become more reliable and efficient. While ROV use still dominates, the inherent cost structure, which includes a large DPII vessel, volumes of deck space and experienced ROV technicians and pilots, are cumulatively helping to open the door for AUV systems for opportunities.
(As published in the January/February 2014 edition of Marine Technology Reporter - www.seadiscovery.com)
Read Lockheed Martin’s Revolutionary AUV in Pdf, Flash or Html5 edition of Jan/Feb 2014 Marine Technology
Other stories from Jan/Feb 2014 issue
Content
- Deck Machinery: Pulling Power page: 10
- Australia’s Largest Research Vessel Ready for Launch page: 14
- Submarine Maneuvering Simulation Technology page: 18
- New Offshore Environmental Lubricant page: 22
- The Quest for Arctic O&G Standards page: 26
- Lockheed Martin’s Revolutionary AUV page: 30
- SeaExplorer Underwater Glider Sets Record page: 36
- Mega Machines Unmanned Systems take Center Stage page: 38
- Jasco has a Long History in Acoustics page: 46
- Oceanology International 2014 Exhibitors page: 53
- New Buoyant Fiber Optic Cable page: 56
- iXBlue Gyrocompass Systems to RFA Tankers page: 56
- Ecuador Adds TRIAXYS Wave Buoys page: 56
- Allspeeds Webtool Safeguards Pressure page: 57
- New Software Supports Pile Installation page: 57
- Fugro Debuts Buoy Mounted LiDAR page: 57
- SubConn Expands Connector Range page: 58
- Navigator Diver-held Sonar for Irish Navy page: 58
- Tidetech Develops Vessel Optimization Data page: 59
- ASMAR Uses FORAN for New Research Vessel page: 59